

PERCy – Perceptive Dependable Cellular Networks for Road Transport
Objective
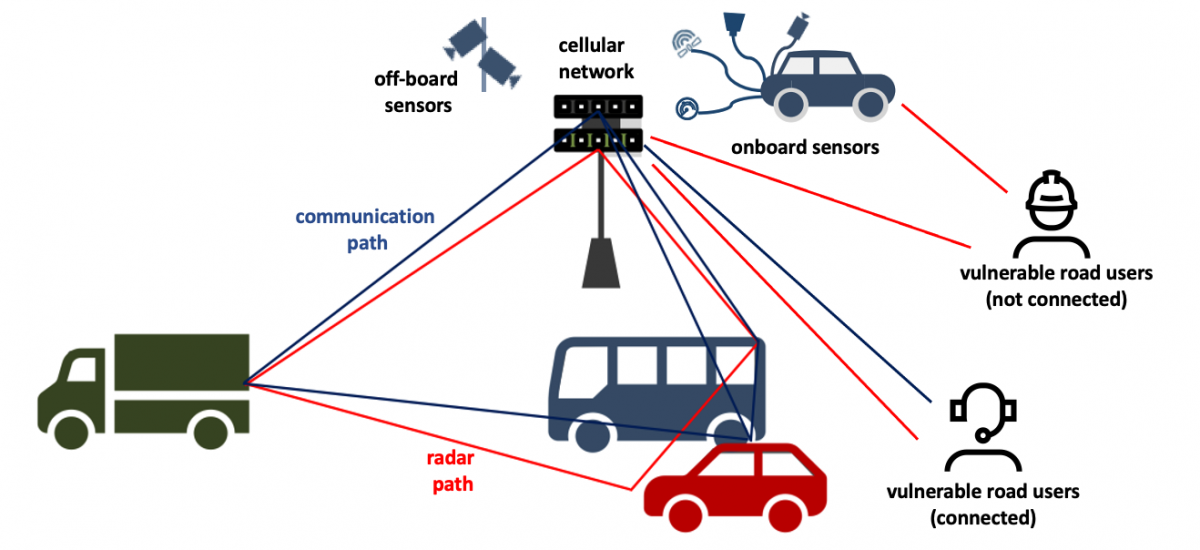
The PERCy project aims to develop a reference architecture, procedures and algorithms that facilitate advanced driver assistance systems and ultimately fully automated driving by fusing data provided by onboard sensors, off-board sensors and, when available, sensory data acquired by cellular network sensing. The fused data is then exploited for safety-critical tasks such as manoeuvring highly automated vehicles in public, open areas. This framework is motivated by the key observation that off-board sensors and information sharing extend the safe operational design domain achieved when relying solely on on-board sensors, thus promising to achieve a highly improved performance-safety balance.

Background
Advanced driver assistance systems – such as adaptive cruise control, autonomous emergency braking, blind-spot assist, lane keep assist, and vulnerable road user detection – are increasingly deployed since they increase traffic safety and driving convenience. These systems’ functional safety and general dependability depend critically on onboard sensors and associated signal-processing capabilities. Since advanced driver assistance systems directly impact the driver’s reactions and the vehicle’s dynamics and can cause new hazards and accidents if they malfunction, they must comply with safety requirements. The safety relevance of onboard sensors is even higher in the case of highly automated driving, where the human driver does not supervise the driving operation. However, current standards and methodologies provide little guidance for collaborative systems, leading to many open research questions.
Crossdisciplinary collaboration
This project is a collaboration between KTH, Ericsson and Scania.
Watch the recorded presentation at the Digitalize in Stockholm 2023 event:
Contacts

Martin Törngren
Professor Unit of Mechatronics and Embedded Control Systems at KTH, Member of the Strategic Research Committee, Chair Working group Digitalized Industry, PI: PERCy, PI: CAVeaT Connected Automated Vehicles trialling and Trustworthiness, Co-PI: Susan’s Ride on Campus2030, Co-PI: Industry 5.0 research towards a circular economy and community building, Digital Futures Faculty
+46 8 790 63 07martint@kth.se

Gabor Fodor
Docent and Adjunct Professor at Intelligent Systems, EECS, KTH, Co-PI: PERCy
+46 76 842 82 29gaborf@kth.se

Ulrik Janusson
Technology leader automation, Scania, Co-PI: PERCy

Mikael Skoglund
Professor and Head of Department, Division of Information Science and Engineering at KTH, Member of the Executive Committee, Associate Director Fellows, ICT TNG Director, Working group Cooperate, Co-PI: PERCy, Co-PI: Humanizing the Sustainable Smart City (HiSS), Main supervisor: Fast Distributed Learning based on Adaptive Gradient Coding with Convergence Guarantees, Digital Futures Faculty
+46 8 790 84 30skoglund@kth.se

Stefano Sorrentino
Principal researcher, Ericsson AB, Co-PI: PERCy