


Ongoing Demonstrator projects
The 2-year Demonstrator projects are the main research instrument of Digital Futures to foster societal outreach. The purpose of these projects is to demonstrate and disseminate technologies for digital transformation and show their impact and potential in society. The results are expected to be disseminated in high impact venues with wide reaches, such as national television, press or more specialist venues with international reach.
The projects should be inter-disciplinary and a collaboration between two PIs of complementary backgrounds that belong to either i) two different KTH schools, ii) KTH school and RISE/Stockholm University, or iii) RISE and Stockholm University.
Click on the headlines below (or navigate the menu to the left) to learn more.

Advancing real-time exoskeleton control for human-in-the-loop optimization
A physical prototype of a modular lower-limb exoskeleton system with a digital interface to a variable real-time controller, equipped with motors that provide variable control...

An AI-based framework for harmonizing climate policies and projects with the SDGs
Extending current assessments of the various synergies and trade-offs among the Sustainable Development...

Autonomous drones and AI-assisted computer vision for near real-time mapping and management of wild stock
An AI-based framework for harmonizing climate policies and projects with the SDGs...

CAVeaT Connected Automated Vehicles trialling and Trustworthiness
Enhance and mature open-source toolchains to support demonstrations and research, addressing safety and adversarial attacks on situational awareness of autonomous vehicles and their countermeasures...

DIRAC: DynamIc uRban roAd traffiC noise simulation model using passive and publicly available data
Aims to develop and demonstrate a high-fidelity road traffic noise simulation model in urban areas, empowered by ubiquitous...
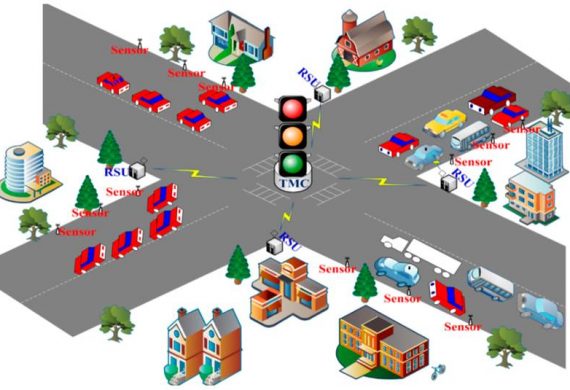
Edge computing for urban traffic monitoring
Embedding low-power event cameras with low-power neuromorphic local computation provides a uniquely scalable solution for the growing need to monitor urban traffic and resource flows in real time...

Embedding AI in an innovative geospatial tool to support policy for clean cooking adoption in low- and middle-income countries
Planning for universal access to clean cooking and contribute to Sustainable Development Goal 7 (SDG7) on Affordable and Clean Energy...

Empowering Cultural Integration and Language Learning through Conversational AI
A language learning system focusing specifically on conversational skills utilizing social robots and conversational AI...

Investigating Sidewalks’ Mobility and Improving it with Robots (ISMIR)
Will, based on empirical data, shed light on sidewalk mobility and improve real-world robot operations...

MicroVRide: Virtual Reality Micromobility Simulator
Addressing how a VR micromobilty simulator can be designed to accommodate the current and future micromobility vehicle innovations and what the implications are...

Mid-sized Seated Haptic Interactions for Autonomous Vehicles
Mid-sized Seated Haptic Interactions for Autonomous Vehicles...
Scavenger: Real-time logic-based control for an autonomous scavenger robot
Aims to develop an open-source ROS-compatible real-time logic-based integrated planning, reasoning and control system for mobile robots...
Semi-automated math tutoring
Aims to develop and study a demonstrator of semi-automated online math tutoring by combining a human approach and automated tutoring. The findings will contribute to research on semi-automated tutoring, a scientific area that has received limited attention...

Spatiotemporal reconstruction with learned deformations for earlier cancer detection via PET imaging
A medical imaging modality that reconstructs the 3D distribution of metabolic activity by detecting photons emitted during the in vivo...
Swedish Question Generation for Assessing Reading Comprehension
SWE-QUEST: Swedish Question Generation for Assessing Reading Comprehension...