


Completed Demonstrator projects
The 2-year Demonstrator projects are the main research instrument of Digital Futures to foster societal outreach. The purpose of these projects is to demonstrate and disseminate technologies for digital transformation and show their impact and potential in society. The results are expected to be disseminated in high impact venues with wide reaches, such as national television, press or more specialist venues with international reach.
The projects should be inter-disciplinary and a collaboration between two PIs of complementary backgrounds that belong to either i) two different KTH schools, ii) KTH school and RISE/Stockholm University, or iii) RISE and Stockholm University.
Click on the headlines below (or navigate the menu to the left) to learn more.
Democratizing Digital DNA Diagnostics
Developing hardware and software for an open-source DNA test to enable point-of-care self-testing...

Demonstrating Rich and Batteryless Human-Powered Interaction using Backscatter Communication
Interactive systems that are limited in energy usage to our bodily capabilities – technology driven by human power...
Digital Futures Drone Arena
A novel aerial drone testbed, where drone competitions take place to understand and explore the relationships between humans and drones...
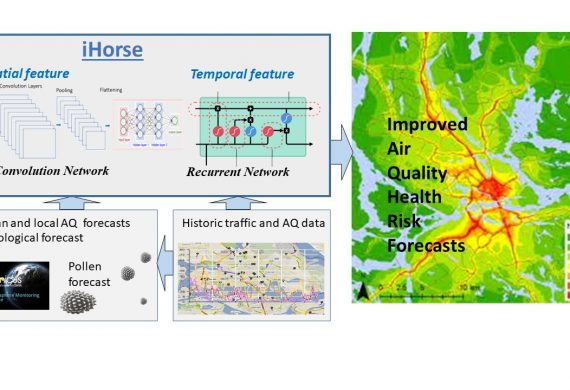
Improving air quality and Health risk forecasts by data-driven modelling of traffic and atmospheric environment
Increasing the accuracy of air pollution and health risk forecasts...

Real-time exoskeleton control for human-in-the-loop optimization
A physical prototype of a modular lower-limb exoskeleton system with a digital interface to a variable real-time controller, equipped with motors that provide variable control...
Susan’s Ride on Campus2030
Demonstrating the potential of digitalization in reducing the carbon footprint and improving the cost-efficiency of the construction and the transportation industry...