
Petter Ögren

Active in these projects
Ongoing
Using Behavior Trees to combine the efficiency of reinforcement learning with performance guarantees regarding safety and goal convergence: Petter Ögren
Background and summary of fellowshipBehaviour Trees (BTs)...
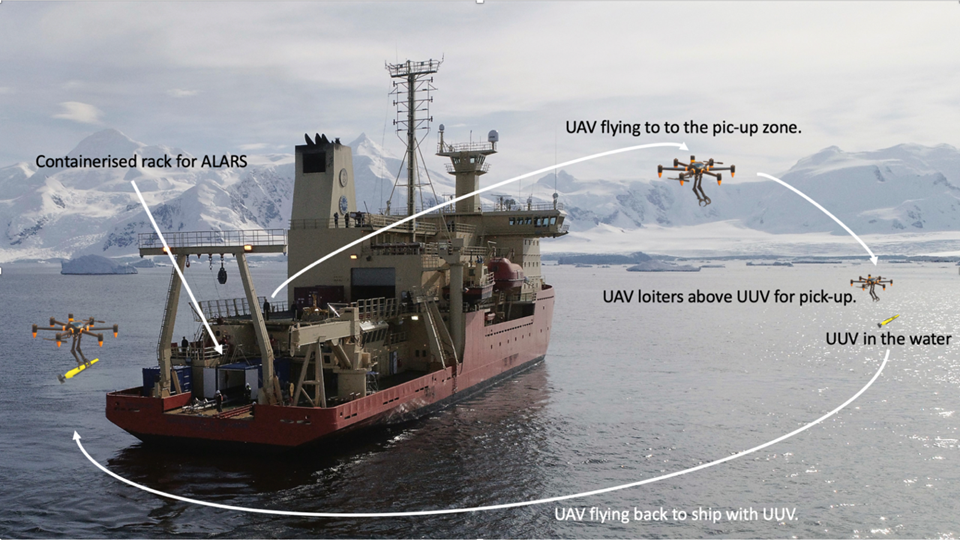
Aerial Launch and Recovery System for Autonomous Underwater Vehicles (ALARS)
About the project Objective The ALARS project aims to drastically...
Designing Interaction-Aware Heterogeneous Multi-Robot Systems
About the project ObjectiveThe objective of this...