
About the project
Objective
Mediverse will showcase how clinical and medical researchers can integrate multimodal health data into a unified knowledge graph. Our showcase will give a live example of advanced data exploration, complex medical searches, and predictive analytics across diverse modalities, such as genomic data, clinical studies, and medical imaging. Leveraging Graph Neural Networks (GNNs) and black-box uncertainty estimation, Mediverse aims to also establish trust in AI-driven healthcare insights, accelerating medical discovery while ensuring transparency and reliability, two instrumental needs in the health sector.
Background
Health data is typically fragmented and siloed across various institutions and data formats, making integration and large-scale analysis highly challenging. Despite regulatory efforts, the problem tends to worsen over the years. At the same time, existing approaches to interoperability struggle to capture the full spectrum of clinical relationships across different medical domains. Mediverse addresses these challenges by embracing data diversity. At its core, our method is based on a unified future-proof hierarchical model built using knowledge graph representations that link diverse healthcare datasets, enabling seamless interaction and in-depth exploration. By incorporating state-of-the-art graph representation learning techniques, Mediverse facilitates cross-ontology mapping, providing a powerful tool for clinicians and researchers to uncover previously inaccessible insights.
Crossdisciplinary collaboration
Mediverse is a collaboration between KTH’s Data Systems Lab (EECS) and the Center for Data-Driven Health (CBH). It brings together valuable expertise in health informatics, knowledge graph modeling, machine learning, and data systems engineering. The project is further strengthened by partnerships with Karolinska Institute, Region Stockholm, and the private sector, enabling real-world validation and deployment within Sweden’s healthcare ecosystem.
About the project
Objective
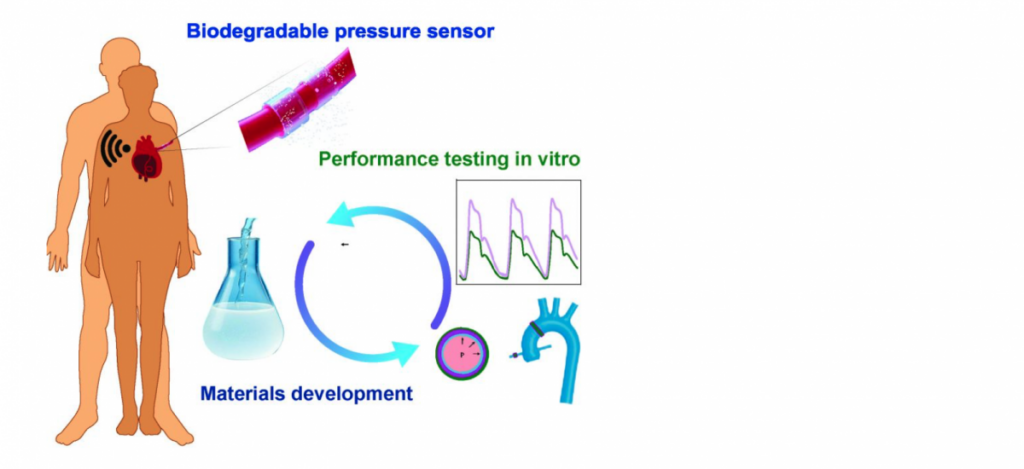
The project aims to develop a self-powered biodegradable pressure sensor with the potential for wireless data transmission that is tested in vitro under conditions that mimic the in vivo environment of physiological blood flow. The pressure sensor is based on the self-powered triboelectric nanogenerator technology and will combine components that enable high performance and on-demand biodegradation. Sensor validation will be enabled by a hybrid mock circulatory loop: an in vitro system that simulate the dynamics of the healthy and pathological patient’s circulatory system. The method will enable to validate sensor-generated pressure signals against reference pressures generated by a digital patient representation.
Objective
The project aims to develop a self-powered biodegradable pressure sensor with the potential for wireless data transmission that is tested in vitro under conditions that mimic the in vivo environment of physiological blood flow. The pressure sensor is based on the self-powered triboelectric nanogenerator technology and will combine components that enable high performance and on-demand biodegradation. Sensor validation will be enabled by a hybrid mock circulatory loop: an in vitro system that simulate the dynamics of the healthy and pathological patient’s circulatory system. The method will enable to validate sensor-generated pressure signals against reference pressures generated by a digital patient representation.
- Erica Zeglio, Assist. Prof. in organic bioelectronics / materials chemistry at the Department of Chemistry at SU, is an expert in materials with ionic and electronic conductivity and their application in bioelectronic devices.
- Seraina Dual, Assist. Prof. in Intelligent Health Technologies at the Department of Biomedical Engineering and Health Systems at KTH, is an expert in implantable sensors and robotic systems for prevention and treatment of cardiovascular disease.
About the project
Objective
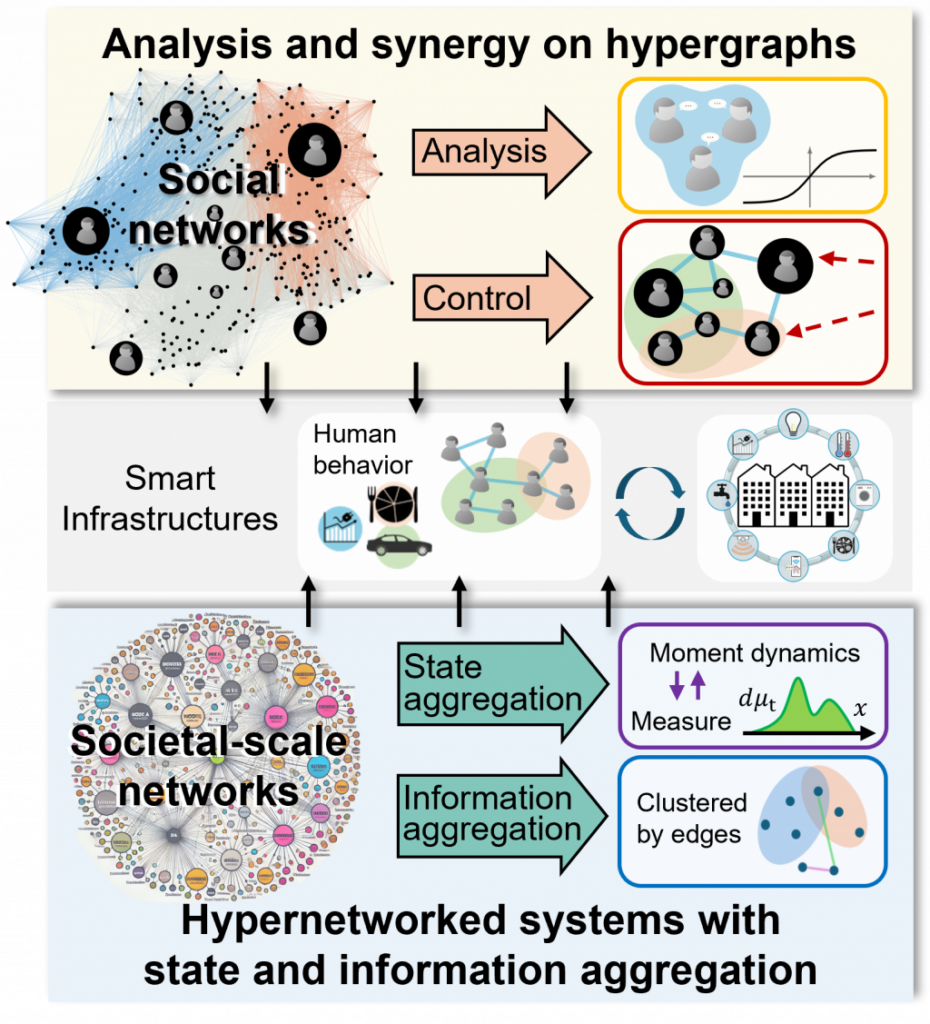
The project aims to develop analysis and synergy mechanisms for complex systems consisting of high-order interactions, with a particular focus on opinion and societal-scale dynamics on hypernetworks. The ultimate goal is to apply the methodology and insight derived from collective behaviors of social dynamics on hypernetworks and moment-based approaches in societal-scale networked systems to design more efficient and sustainable infrastructures. These include transportation systems, smart grids, and smart buildings, where human decisions and group interactions are pivotal.
Background
In recent years, there has been a growing interest in studying the collective behavior of systems with higher-order interactions. The motivation stems from a practical need in real-world applications where the phenomena observed in complex systems cannot be adequately captured by considering only pairwise interactions between agents. Instead, these systems require the inclusion of higher-order interactions, often represented by hypergraphs or simplicial complexes. Such a need is evident in numerous applications, ranging from neuron dynamics to protein interaction networks, and from ecological systems to social systems. Understanding how these high-order interactions affect collective behaviors in social dynamics and incorporating their effects into human-involved infrastructures is greatly needed.
Crossdisciplinary collaboration
Our research team is formed by PIs from two KTH Schools, Angela Fontan (KTH/EECS) and Silun Zhang (KTH/SCI). The project team will also include a postdoctoral researcher with a strong background and interest in networked systems, control and systems theory, optimization, and large-scale system modeling.
About the project
Objective
The project envisions a mobile cyber-physical system where people carrying mobile sensors (e.g., smartphones, smartcards) generate large amounts of trajectory data that is used to sense and monitor human interactions with physical and social environments. Built upon the static causal inference results in the cAIMBER project, the CIML4MOB project aims to build causally informed machine learning models for predicting adoption time of individuals and subpopulations and their risks of attrition by input dates. Such dynamic causal models may then drive policy design strategies for lasting behavioral changes (the ultimate purpose of behavior interventions).
Background
The ever-changing mobility landscape and climate change continue to challenge existing operating models and the responsiveness of city planners, policymakers, and regulators. City authorities have growing investment needs that require more focused operations and management strategies that align mobility portfolios to societal goals. The project targets the root cause of traffic (human) and proposes causally informed machine learning to learn and predict human mobility dynamics from pervasive mobile sensing data that helps cities meet both sustainability challenges and improve urban resilience to disruptive events.
The human mobility dynamic problem is defined to predict travel choice decisions given a set of factors, including for example individual traits, travel contexts, and interventions. The research pair project (cAIMBER, 2022-2024) developed the data-driven causal inference method to discover the static causal graph of behavior responses to interventions in public transport. The cAIMBER causal model allows for analysis and prediction of human behavior based on population features, but without regard to when individuals or other subpopulations will adopt the desired behavior of a certain incentivization program. From the perspective of city planning and utility costs, two fundamental questions are (1) how to incentivize early adoption of the desired behavioral shift (adoption time) and (2) given an individual has shifted their behavior, how to prevent reversion to baseline behavior (attrition time). The research consolidator project, CIML4MOB, aims to build upon cAIMBER results to build causally informed machine learning models for predicting adoption time of individuals and subpopulations and their risks of attrition by input dates.
Crossdisciplinary collaboration
The research collaborates between researchers in transportation science and mathematics at KTH.
About the project
Objective
This project aims to develop a collaborative spatial perception framework that constructs various levels of abstract representations in a city-scale area, incorporating LiDAR point clouds, RGBD images, and remote sensing images collected by various agents in a collaborative autonomous system.
Background
The concept of digital twins, involving the creation of virtual representations or models that accurately mirror physical entities or systems, has garnered growing research attention in the realm of smart cities. However, a critical challenge in realizing digital twins lies in efficiently collecting data and recreating the real world, a task that typically demands substantial human effort. To address this gap, autonomous robots, originally designed to reduce human workload, hold immense potential in shaping the future of digital twinning. These robots can potentially assume a pivotal role in autonomously creating and updating the complete mirroring of the physical world, paving the way for the next generation of digital twinning.
About the Digital Futures Postdoc Fellow
Yixi Cai completed his PhD degree in Robotics at Mechatronics and Robotic Systems (MaRS) Laboratory from Department of Mechanical Engineering, University of Hong Kong. His research focuses on efficient LiDAR-based mapping with applications on Robotics. During his PhD journey, he explored the potential of LiDAR technology to enhance the autonomous capabilities of mobile robots, particularly unmanned aerial vehicles (UAVs). He developed ikd-Tree, FAST-LIO2, and D-Map that have been widely used in LiDAR community. He is deeply interested in exploring elegant representations of the world, which would definitely unlock the boundless possibilities in Robotics.
You might find more information about him from his personal website: yixicai.com
Main supervisor
Patric Jensfelt, Professor, Head of Division of Robotics, Perception, and Learning at KTH Royal Institute of Technology, Digital Futures Faculty
Co-supervisor
Olov Andersson, Assistant Professor at Division of Robotics, Perception, and Learning at KTH Royal Institute of Technology, Digital Futures Faculty
About the project
Objective
The project creates opportunities for a new form of public performances where the line between artists and audience is blurred. We work with mixed and augmented reality together with immersive participation and new mobile communication technology. We will demonstrate this in an interactive performance in a public environment.
The project aims at:
- Creating a completely novel arena for immersive, participatory and creative cultural events using mobile communications and 3D/Mixed Reality (MR) innovations
- Allowing artists and audience to participate in real-time performative events like theatre, music and dance, both indoors and outdoors in public spaces
- Developing an experimental mobile AR and MR visualizing and auditive platform allowing creation of new types of participatory artistic performances, utilizing cutting edge colocation and spatial map/digital twin technologies
Background
We focus on the creation of a completely new form of public performances where physical actors can interact with virtual actors, and with physical and virtual objects. The project develops and studies both artistic creative processes and new wireless communication technology such as WiFi7 and 6G. We also use a number of prototypes developed in collaboration between Stockholm University and Ericsson Research during 2023–2024.
Central to the SECE project is the use of mixed reality (MR), enabling us to mix physical and virtual actors, objects and environments. The goal is to enable performances also outdoors, which is a big challenge with today’s technology.
The project involves expertise from many different directions and areas such as mobile communication, augmented and mixed reality, artistry and choreography.
Project webpage on Stockholm University website
Crossdisciplinary collaboration
The SECE project is a collaboration between the Department of Computer and Systems Sciences (DSV) at Stockholm University, Ericsson Research and Kulturhuset Stadsteatern.
About the project
Objective
- Reallocate maintenance resources from purely scheduled (preventive) activities to condition‐based and predictive strategies, thereby freeing time for future upgrades and investments.
- Identify cost drivers within the pump systems to target the layers where maintenance improvements yield the highest savings.
- Develop a predictive maintenance algorithm that incorporates a reliability index and measurable parameters to classify pump status and estimate remaining service life, assigning each pump a condition score (1 = new, 5 = worn).
- Pilot and validate the new solution at Högdalen pump station, installing and evaluating additional sensing equipment as needed.
- Ensure compatibility with Stockholm’s IoT platform, positioning the project as a first step toward broader adoption across city departments and external companies.
Background
Wastewater collection networks are essential for ensuring public health and wellbeing, yet they are susceptible to numerous faults including pipe bursts, pump malfunctions, and valve failures. Traditionally, preventing these issues has depended on frequent inspections and reactive repairs. However, there is growing recognition that a more proactive strategy—one rooted in predictive and condition-based maintenance—can both enhance the reliability of wastewater infrastructure and streamline the resources required to operate it. Such an approach can significantly reduce unexpected downtime, extend equipment lifespans, and ultimately lower overall lifecycle costs.
Despite the promise of prognostic models for predictive maintenance in many industries, water infrastructure has not received as much attention as manufacturing or other sectors. Current diagnostic tools in this domain are often tailored to a specific component or pump type, requiring specialized local measurements such as vibrations, oil temperature, or power consumption. In wastewater networks with diverse types of stations and pumps, designing a model for each component can be time-consuming. Moreover, missing measurements or uncertain behavior pose additional challenges. Consequently, the need has emerged for a flexible, data-driven solution capable of handling variations in station design, measurement availability, and environmental conditions.
The DECORUM (Optimized Predictive Maintenance for Wastewater Pump Stations) project, establishes the cooperation between the City of Stockholm, the Stockholm water utility operator (SVOA), the international water technology firm Xylem, and KTH to fill these gaps. SVOA alone operates roughly 300 wastewater pump stations, each with multiple pumps crucial to the city’s sewage system. Through a six-step development plan, SVOA has already taken steps to reduce maintenance costs while preserving high operational reliability. The next milestone is to move from largely manual, reactive procedures toward data-driven, predictive strategies that detect anomalies early, recommend targeted maintenance, and help technicians make informed decisions about when and how to service equipment.
Crossdisciplinary collaboration
The DECORUM project brings together a multidisciplinary team spanning academia, industry, and municipal stakeholders. KTH researchers contribute expertise in systems modeling, predictive algorithms, and robust control, while SVOA provides domain knowledge of large-scale wastewater operations and real-world operational data. Xylem, as a leading water technology company, offers more in-depth insights into cutting-edge pump hardware and software solutions. By uniting these diverse perspectives, the project can address both theoretical and practical challenges, ultimately delivering a flexible, scalable, and impactful predictive maintenance framework for critical urban infrastructure.