
About the project
Objective
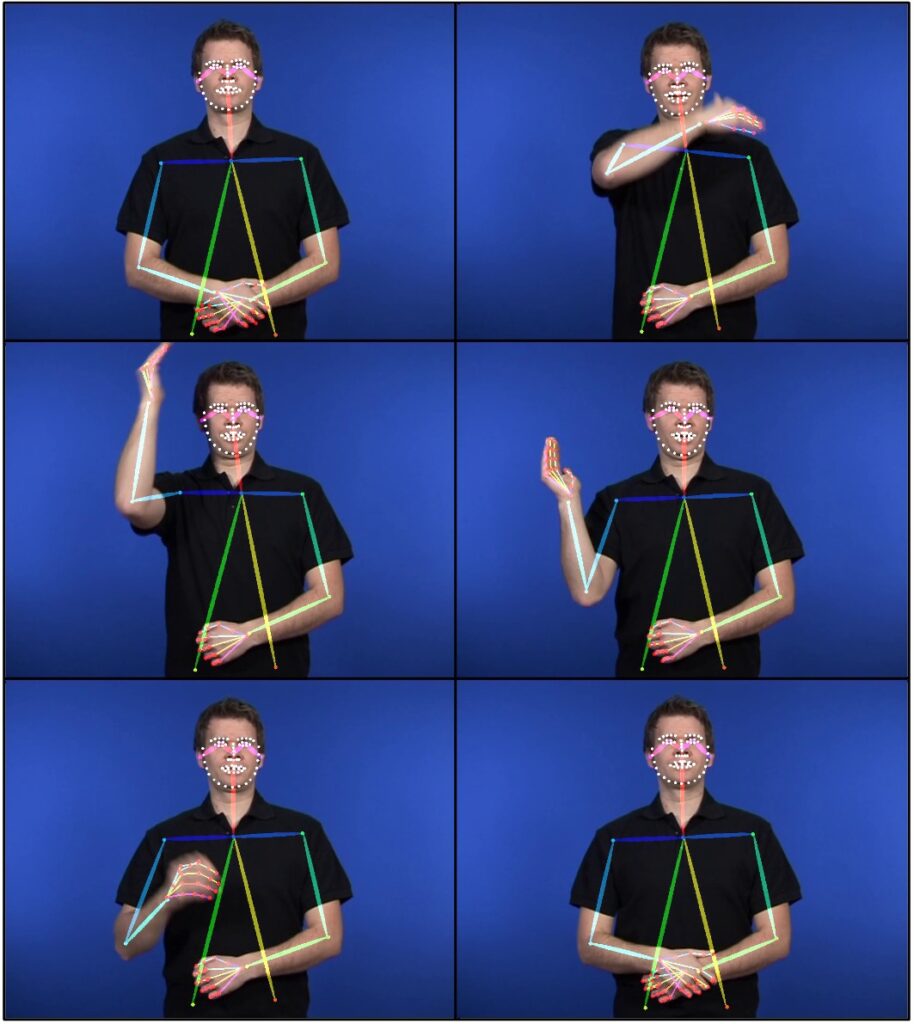
In this project we develop semantic tokenization models for sign language (SL), and combine these with large language models, leading to machine learning models that can understand, process, translate and generate SL efficiently. To achieve this, we will pool together large data resources, through our collaboration with SVT and other large-scale multilingual sign language datasets.
We will fine-tune and evaluate our models across a number of downstream tasks e.g., sign language recognition, segmentation, and production. The project addresses the need for inclusive and accessible urban infrastructures by reducing communication barriers for the deaf and signing communities, e.g. via automated translation and interpretation services that can enable seamless interaction between signers and non-signers, fostering integration in public services, workplaces, and social settings.
Background
Currently, we are seeing an AI-revolution fueled by large language models. What started out as text-only models has developed into generalized multimodal information processing frameworks, handling many languages, and different modalities such as images, speech and video, often with surprising accuracy.
Sign languages are visuo-spatial natural languages used by more than 70 million people world wide. Sign languages lack a text-based representation, and have not been part of, or benefited from, the large language model or foundation model developments. Furthermore, sign language technology is not being prioritized by the large corporate interests that are driving current AI developments.
Signed languages represent a special challenge since they, in contrast to spoken languages, have no universally adopted written form. For storage and transmission, one has to rely on video. For communication between signers and non-signers, either costly interpreter services are required, or one has to resort to limited text-based communication – which will be in a second language to a native signer. The promise and potential utility of sign language (SL) technology is thus substantial in terms of reducing communication barriers, allowing for signers to use language technology in their native language. Despite this, progress in SL technology has been limited in comparison to the rapid development for spoken languages. In this project we suggest an efficient way to allow sign language to inhabit the LLM ecosystem and benefit from the GPT-revolution.
Cross-disciplinary collaboration
The proposed project is a multidiciplinary endeavor. Advancing the state of the art in SL processing through foundation models requires combined expertise in machine learning, spoken language engineering, data processing and SL corpora and SL linguistics, including native sign-language users. The project team is composed to provide this expertise.
About the project
Objective
This project aims to explore the emerging gigantic multiple-input multiple-output (gMIMO) technology in the physical layer, using methodology from signal processing and information/communication theory. gMIMO relies on using 10 times more antennas in base stations and user devices than in current networks, by operating in the upper mid-band where antennas are smaller. This enables massive spatial multiplexing and beamforming. The research results are anticipated to be applied to 6G and future wireless communication networks and provide valuable insights into their integration within a wide range of digital transformation.
Background
Sixth-generation (6G) wireless communication is crucial for enabling society’s digital transformation and future cyber-physical world. Many transformative applications, such as ultra-massive connectivity, immersive extended reality (XR) communication, smart factories, and intelligent transportation systems, can be efficiently facilitated by intelligent 6G wireless networks. To support these extensive usage scenarios, delivering exceptionally high data rates to many users is important. Since fourth-generation (4G) wireless networks, multiple-input multiple-output (MIMO) technology has been a key technology to deliver higher rates.
With the advancement of wireless networks, MIMO technology has also significantly evolved with the continually increasing number of antennas. To further empower the 6G and future wireless networks, gigantic MIMO (gMIMO) is highly anticipated by utilizing hundreds or a thousand antennas, which is the major focus of this project.
About the Digital Futures Postdoc Fellow
Zhe Wang received his PhD degree in 2025 from the School of Electronic and Information Engineering at Beijing Jiaotong University, China. His research focuses on promising 6G wireless communication technologies, including gigantic MIMO, cell-free massive MIMO, and near-field communication.
Main supervisor
Emil Björnson, KTH
Co-supervisor
Vitaly Petrov, KTH
About the project
Objective
Goal of the project is to establish a cross-disciplinary research activity that brings together experts in privacy, wireless systems, and legal frameworks to explore and define future research directions. The research will be collaboratively done the strategic partner Ericsson so that the seed project will contribute towards shaping the future of privacy-aware 6G systems.
Background
This seed project addresses a strategically critical challenge for future wireless telecommunication systems: how to ensure strong privacy guarantees in location-based services and sensing applications in future telecommunication networks. Privacy concerns—particularly for time-series mobility data and joint communication and sensing (JCAS) systems—pose a serious risk to the deployment of emerging services and the legal compliance of new technologies.
Cross-disciplinary collaboration
Experts from privacy, wireless systems, and legal domain are involved.
PI: Tobias Oechtering
Co-PIs: Mats Bengtsson, György Dan, Hongyu Jin, Panagiotis Papadimitratos, Henrik Sandberg and Mathias Ekstedt
About the project
Objective
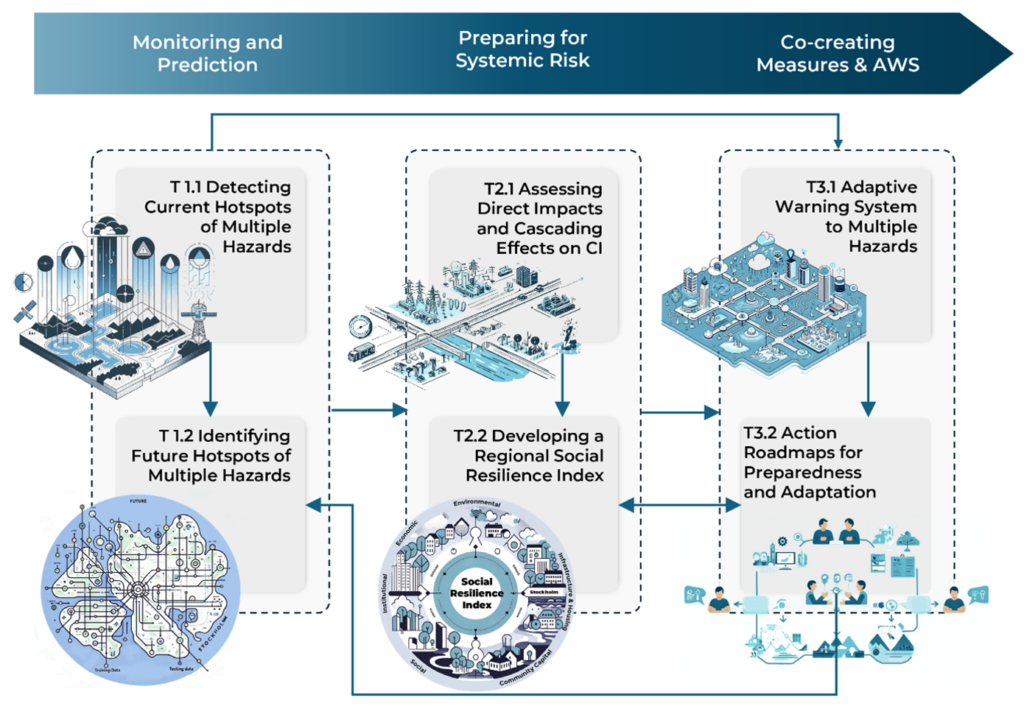
The project aims to enhance the resilience and preparedness of Stockholm against multiple hydrometeorological hazards, primarily flooding, droughts, and heatwaves, by developing innovative monitoring systems, assessing systemic risks, and co-creating adaptive warning systems and action roadmaps with stakeholders.
Background
Urban areas are increasingly vulnerable to hydrometeorological hazards, which are growing in frequency and severity due to climate change and urbanization. These events pose significant risks to Critical Societal Services and Infrastructure (CSSIs), including transport, water, and energy systems. Traditional risk analyses often focus on single hazards and overlook cascading impacts across interconnected systems. CASCADE addresses this gap by integrating advanced AI-based prediction models, network analysis, and stakeholder-driven approaches to build a comprehensive framework for disaster preparedness and climate adaptation.
Cross-disciplinary collaboration
CASCADE brings together expertise from KTH Royal Institute of Technology, the City of Stockholm, and RISE. The collaboration integrates environmental and water engineering, computer science, systems analysis, and urban planning with practical municipal and industry perspectives. This transdisciplinary partnership ensures that solutions are scientifically rigorous, technologically advanced, and practically applicable.
About the project
Objective
This research aims to develop learning-to-optimize (L2O) methods to enhance real-time decision-making in modern energy grids. The focus is twofold: improving the efficiency of model predictive control under operational constraints, and accelerating the computation of Nash equilibria in competitive multi-agent scenarios.
By integrating machine learning with optimization, the project seeks to deliver solvers that are both fast and reliable, capable of generalizing across varying grid conditions. This work supports the broader goal of enabling more adaptive, efficient, and robust energy systems in the face of increasing complexity and renewable integration.
Background
The growing complexity of energy systems, driven by renewable energy, distributed assets, and diverse stakeholders, has created a pressing need for real-time, efficient decision-making tools. Traditional optimization methods often fall short under tight time constraints and non-convex, large-scale settings. However, many of these problems exhibit structural similarities across instances—such as similar dynamics or constraint patterns—which can be leveraged by learning-based methods. This repeated structure makes energy systems a natural fit for L2O approaches, which can learn from past problem instances to accelerate future optimization while maintaining feasibility and convergence.
About the Digital Futures Postdoc Fellow
Andrea Martin completed his PhD in Robotics, Control, and Intelligent Systems at EPFL, Switzerland, in 2025, with a thesis on optimal control and decision-making under uncertainty. His research interests include control theory, optimization, and machine learning. Prior to that, he earned master’s degrees in Automation Engineering from the University of Padua, Italy, and in Automatic Control and Robotics from the Polytechnic University of Catalonia, Spain, in 2020. He received his bachelor’s degree in Information Engineering from the University of Padua in 2017.
Main supervisor
Giuseppe Belgioioso, Division of Decision and Control Systems, KTH.
Co-supervisor
Mikael Johansson, Division of Decision and Control Systems, KTH.
About the project
Objective
Asreen Rostami joined RISE Cybersecurity as an ERCIM postdoctoral fellow. Her research was focused on “humanising” Internet of Things (IoT) security to provide an understanding of the technical, design, social and political issues that arise when considering IoT systems from a human-centred perspective. Her current research under the Digital Futures postdoctoral fellowship program is centred around bringing marginalised perspectives into cyber security, starting with looking at the deviant use of smart home devices.
She aims to develop gender-inclusive cyber security, a human-centred approach to security that encompasses feminist principles such as diversity, autonomy, respect, and consent and applies them in a digital context.
About the Digital Futures Postdoc Fellow
Asreen Rostami holds a PhD in the area of HCI from Stockholm University. Her doctoral research was focused on the incorporation of interactive technologies in designing and experiencing interactive and mixed-reality performances, during which she developed a design concept (frictions) used to create an immersive and engaging VR experience and co-designed and staged a mixed-reality performance (Frictional Realities, 2019) in collaboration with a group of Swedish artists.
Main supervisor
Barry Brown, Professor, Department of computer and systems sciences, Stockholm University.
Co-supervisor
Shahid Raza, Associate Professor, RISE Cybersecurity, RISE Research Institutes of Sweden.
About the project
Objective
My research plan focuses on the second-order, online, and robust algorithms for decentralized machine learning, aiming to propose efficient algorithms with convergence guarantees and study the applications. For example, distributed training with multi-core processors enables faster and more efficient training of machine learning models; wireless sensor networks serve for smart buildings and automatic driving in decentralized manners; hospitals cooperatively study disease prevention and treatment while protecting patients’ privacy.
Background
Big data over geographically distributed devices is the new oil of the digital future. However, we cannot mine it within data centres due to privacy preservation and communication efficiency issues. Instead, we resort to learning over networks. My research plans to develop second-order, online, and robust decentralized algorithms with convergence guarantees. This plan perfectly fits the themes of Digital Futures: trust, cooperation, and learning.
About the Digital Futures Postdoc Fellow
Jiaojiao Zhang received a B.E. degree in automation from the School of Automation, Harbin Engineering University, Harbin, China, in 2015 and a master’s degree in control theory and control engineering from the University of Science and Technology of China, Hefei, China, in 2018. She received her PhD in operations research from the Department of Systems Engineering and Engineering Management, The Chinese University of Hong Kong (CUHK), Hong Kong, in 2022. She received the Hong Kong PhD Fellowship Scheme (HKPFS) in August 2018. Her current research interests include distributed optimization and algorithm design.
Main supervisor
Mikael Johansson, Professor, Division of Decision and Control Systems, KTH.
Co-supervisor
Joakim Jaldén, Professor, Division of Information Science and Engineering, KTH.
Watch the recorded presentation at the Digitalize in Stockholm 2023 event.