
Background and summary of fellowship
Behaviour Trees (BTs) represent a hierarchical way of combining low-level controllers for different tasks into high-level controllers for more complex tasks. The key advantages of BTs have been shown to include the following:
- Recursive structure: The BT is a rooted tree and at every edge of that tree, the interface between the parent and the subtree is the same, centred around a return status of either Success, Failure or Running.
- Modularity: Due to the recursive structure, a complex subtree can be seen as a single leaf, and vice versa. This enables the encapsulation of complexity.
- Transparency: The recursive structure of BTs makes them human-readable. You can always look at a BT and see why it is executing a particular behaviour. This fact in combination with the modularity described above enables a user to understand complex BTs by analyzing one subtree at a time.
- An efficient tool for human system design: BTs were created by computer game programmers to make their life easier when creating complex AI designs. Modularity is a well-known tool to handle complexity, and transparency is vital in any human design.
- An efficient tool for automated design. The modular recursive structure simplifies automated design.
- A structure that enables formal analysis of safety and convergence. Formal analysis of convergence and region of attraction is enabled by the modular recursive structure.
In this project, we will use the properties of BTs listed above to synthesize controllers that combine the efficiency of reinforcement learning with formal performance guarantees such as safety and convergence to a designated goal area.
Background and summary of fellowship
Reinforcement Learning (RL) is concerned with learning efficient control policies for systems with unknown dynamics and reward functions. RL plays an increasingly important role in a large spectrum of application domains including online platforms (recommender systems and search engines), robotics, and self-driving vehicles. Over the last decade, RL algorithms, combined with modern function approximators such as deep neural networks, have shown unprecedented performance and have been able to solve very complex sequential decision tasks better than humans. Yet, these algorithms are lacking robustness, and are most often extremely data inefficient.
This research project aims at contributing to the theoretical foundations for the design of data-efficient and robust RL algorithms. To this aim, we develop a fundamental two-step process:
- We characterize information-theoretical limits for the performance of RL algorithms (in terms of sample complexity, i.e., data efficiency)
- We leverage these limits to guide the design of optimal RL algorithms, algorithms approaching the fundamental performance limits
Background and summary of fellowship
Over the last decade, academia and the industry of networked systems have become more and more interested in novel real-time applications. These applications arise for one in the area of Cyber-Physical Systems (CPS) where essentially time-sensitive processes are to be governed by direct actuation. On the other hand, these applications also arise in the context of providing automated feedback to human users, for instance, in augmented reality as well as cognitive assistance. Such interactive applications are very powerful with respect to their future implications for professional education, ambient intelligence as well as leisure. It is therefore likely that they will have a profound impact on networked systems. Nevertheless, from a fundamental perspective, we have very little understanding of the efficient operations of networked systems for such interactive applications today.
The goal of this project is to provide fundamental performance models for these interactive applications and the operation of underlying networked systems. In contrast to state-of-the-art, our key approach is to capture the essential trade-offs through a novel notion of utility of the received information over time, and subsequently to strive for system optimizations. Central to our application are novel sampling policies, which we derive by leveraging Markov Decision Processes. By this, we aim at providing a cornerstone for the design of future networked systems exposed to interactive applications.
Background and summary of fellowship
Sarunas Girdzijauskas’ research interests are on the intersection of distributed systems and machine learning fields and fall under “Cooperate” and “Learn” research themes, addressing “Smart Society” as well as “Rich and Healthy Life” societal contexts of Digital Futures Strategic Research Programme.
There are many societal problems plaguing current AI services provided by modern Big Tech behemoths, which collect and process user data in a centralized manner. Such data collection and processing inevitably leads to a wide spectrum of issues from data privacy, system security to severe scalability and power consumption issues. Sarunas Girdzijauskas’ research focuses on solutions enabling the transition from classical centralized machine learning to Federated and Decentralized Machine Learning technologies. A particular focus is on developing decentralized architectures for graph analytics and graph machine learning which would enable a wide range of current AI services (e.g., product recommendation systems, social network news feeds etc.) to be provided without the need of centrally collecting data.
About the project
Join the Second Drone Challenge at the Digital Futures Drone Arena, a one-of-a-kind interactive event with aerial drone technology! This year, the challenge focuses on moving with drones in beautiful, curious, and provocative ways – without needing to write a single line of code. The event takes place on May 16-17, 2023, at KTH’s Reactor Hall in Stockholm, Sweden. Read more about the challenge, the prizes, and how to sign up on our Drone Arena challenge website.
Objective
The Digital Futures Drone Arena is a concrete and conceptual platform where key players in digital transformation and society join in a conversation about the role and impact of mobile robotics, autonomous systems, machine learning, and human-computer interaction.
The platform is a novel aerial drone testbed, where drone competitions occur periodically to understand and explore the unfolding relationships between humans and drones. Aerial drones are used as an opportunity to create a foundation that lives past the end of this project. It is a long-standing basis for testing technical advances and studying, designing, and envisioning novel relationships between humans, robots, and their functioning principles.
Background
Few robot testbeds exist to experiment with application-level functionality. The Digital Futures Drone Arena bridges this gap by providing an easy-to-use programmable drone testbed for experimenting with novel drone applications and exploring the relations between humans and drones. The latter activity is driven by the concept of a ‘soma’ or the lived and felt body as it exists, moves, and senses the world. The theory provides an ethical stance on the soma, highlighting how technologies and interactions encourage certain movements and practices while discouraging others. As a critique of technology design and use, somaesthetics addresses the limited and limiting ways we sit at desks and tap away at keyboards. When we interact closely with drones, we must adapt to how we control them and move around them.
Crossdisciplinary collaboration
The researchers in the team represent the Connected Intelligence Unit, RISE and the Department of Computer and Systems Sciences, Stockholm University.
Articles:
About the project
Objective
In this project, we propose to extend current assessments of the various synergies and trade-offs among the Sustainable Development Goals (SDGs) proposed by the United Nations (UN) via methods based on artificial intelligence (AI). The project will also strengthen the collaboration between Digital Futures and the KTH Climate Action Centre.
The proposed research project is relevant due to the pressing need to develop a policy that enables, rather than inhibits, sustainable development. Furthermore, including AI-based methods in governance actions and development programs is essential.
Background
This is currently an active area of research, where several studies have started to document the interactions among SDGs systematically. As this type of work is extremely relevant for policymakers, as well as to guide promising research directions to explore by funding agencies, we will:
- Compare AI-based analyses with expert-based studies.
- Systematically assess (via AI methods) synergy and trade-offs connected to climate policy decisions in the context of the SDGs.
- In the final stage, employ reinforcement-learning-based methods to design novel and efficient strategies for policy development, maximizing the opportunities among SDG actions and avoiding the pitfalls.
Crossdisciplinary collaboration
The researchers in the team represent the KTH Schools of Engineering Sciences, the Department of Engineering Mechanics, the School of Industrial Engineering and Management, and the Climate Action Centre.
About the project
Objective
The aim of the research team is to realise and research the first objects of programmable, robotic matter. Robotic matter consists of thousands or millions micro-scale components and forms objects that can autonomously change their shape and material properties. The research results can be the foundation for future generations of robotic matters configured with various physical functionalities.
Background
Robotic matter does not exist today, but if we can create and use it, we could solve several major societal challenges. The ultimate scenario is the opportunity to create all kinds of objects. An everyday and relevant example is using robotic matter to create and re-create packaging instead of using non-circular plastic materials. Another example is a decreased demand for transportation of goods when we can create any object we want in the location where it is needed.
Cross-disciplinary collaboration
The research team represents the School of Electrical Engineering and Computer Science (EECS, KTH) and the School of Engineering Sciences in Chemistry, Biotechnology and Health (CBH, KTH).
Press & Media
Article in Elektroniktidningen: https://issuu.com/etndigi/docs/etn2102ld
or download a pdf here: Article in Elektroniktidningen Feb 2021
Activities & Results
Results
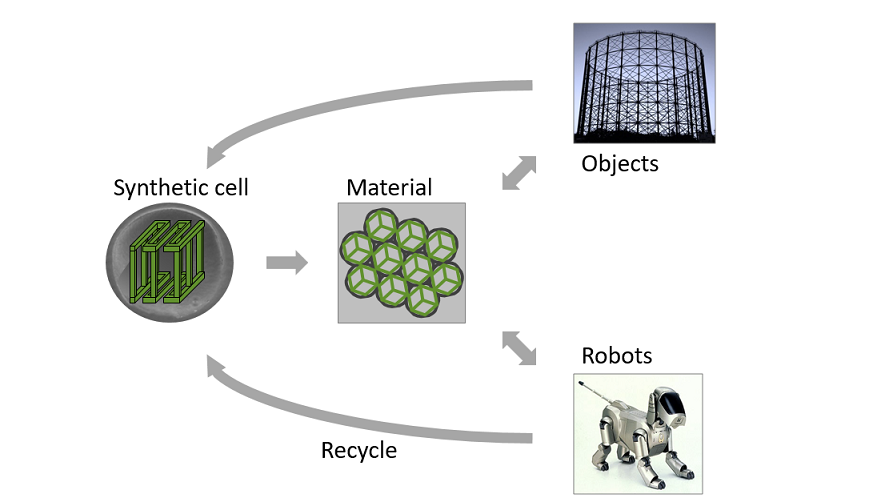
We aim to build robotic matter consisting of thousands or millions of microscale components, so-called “synthetic cells”, that form objects that can autonomously change their shape and material properties.
Realising this objective requires combining four sub-objectives:
- Synthesis of the synthetic cells
- Thermoreversible bonding of the synthetic cells
- Magnetic orientation of synthetic cells with anisotropic properties to program the overall material properties emerging from the resulting cell conglomerate
- Transporting synthetic cell material throughout the object to program the overall material shape
Project results
WP1 Synthesis and thermoreversible bonding results:
Investigating the thermoreversible bonding of microparticles.
WP2 Magnetic material programming results:
Investigating integration of small magnets in every cell, and the material property programming by magnetically rotating the anisotropic cells prior to fixation.
WP3 Shape programming results:
Introducing shape programming of solid objects based on the local fluidisation of the object, followed by transport of the fluidised substance through the object by an internal pumping mechanism.
Publications
We like to inspire and share interesting knowledge!
- Programmable Matter with Free and High-Resolution Transfiguration and Locomotion; Kerem Kaya, Alexander Kravberg, Claudia Scarpellini, Emre Iseri, Danica Kragic and Wouter van der Wijngaart. First published on 24 December 2023 in Advanced Functional Materials.
- Copper-mediated synthesis of temperature-responsive poly(N-acryloyl glycinamide) polymers: a step towards greener and simple polymerisation; Nikola Křivánková, Kerem Kaya, Wouter van der Wijngaart and Ulrica Edlund. First published on 4 October 2023 in RCS Advances.
- Soft metamaterial with programmable ferromagnetism; Kerem Kaya, Emre Iseri and Wouter van der Wijngaart. First published on 6 December 2022 in Microsystems and Nanoengineering.