
About the project
Objective
In collaboration with Karolinska University Hospital (KUH) and Karolinska Institute (KI), the PI and Co-PI of KTH propose the ISPP postdoc project EMERDENSY to develop trust-worthy machine learning algorithms with explainable outcomes and then use the algorithms for the design of Early Warning Systems (EWS).
Background
Artificial Intelligence (AI) can be used to detect infection. Often, doctors and nurses cannot be sure about the growth of infection due to the absence of clearly visible symptoms. Once infection starts, the body’s immune system starts to fight bacteria and viruses. Physiological parameters of the body, such as heart rate, blood pressure, breathing patterns, and temperature, change slowly.
AI can detect subtle changes, but humans cannot. AI can also predict infection type and patient deterioration. The medical care team will then spend precious time deciding on life-saving interventions. This heralds the use of AI-based early warning systems (EWS).
The big question: can we trust the AI systems, mainly its core called machine learning for data analysis and predictions? Can the machine learning algorithms explain their predictions to the healthcare personnel?
Partner Postdoc(s)
Yogesh Todarwal
Main supervisor
Saikat Chatterjee, Associate Professor, Division of Information Science and Engineering at KTH
Co-supervisor
Sebastiaan Meijer, Professor and Vice Dean, Division of Health Informatics and Logistics at KTH
About the project
Objective
The PERCy project aims to develop a reference architecture, procedures and algorithms that facilitate advanced driver assistance systems and ultimately fully automated driving by fusing data provided by onboard sensors, off-board sensors and, when available, sensory data acquired by cellular network sensing. The fused data is then exploited for safety-critical tasks such as manoeuvring highly automated vehicles in public, open areas. This framework is motivated by the key observation that off-board sensors and information sharing extend the safe operational design domain achieved when relying solely on on-board sensors, thus promising to achieve a highly improved performance-safety balance.
Background
Advanced driver assistance systems – such as adaptive cruise control, autonomous emergency braking, blind-spot assist, lane keep assist, and vulnerable road user detection – are increasingly deployed since they increase traffic safety and driving convenience. These systems’ functional safety and general dependability depend critically on onboard sensors and associated signal-processing capabilities. Since advanced driver assistance systems directly impact the driver’s reactions and the vehicle’s dynamics and can cause new hazards and accidents if they malfunction, they must comply with safety requirements. The safety relevance of onboard sensors is even higher in the case of highly automated driving, where the human driver does not supervise the driving operation. However, current standards and methodologies provide little guidance for collaborative systems, leading to many open research questions.
Crossdisciplinary collaboration
This project is a collaboration between KTH, Ericsson and Scania.
About the project
Objective
Atlas Copco is a world leader in safety-critical assembly tools widely used in industries like automotive, aviation, and mobile phones. To maintain its world-leading position, Atlas Copco would like to error-proof its handheld tightening tools to ensure that depending on the assembly, the bolts are tightened with the right tightening program and in the right sequence, and no bolts are left untightened. Atlas Copco would like to use an AI/ML-based sensor fusion system to achieve this. The form factor, power budget, latency, and cost requirements rule out the use of COTS like GPUs, TPUs, or FPGAs. ASICs (Application Specific Integrated Circuits) would meet these constraints, but they take too long, are very expensive, and require specialist competence that Atlas Copco lacks. KTH has developed a Lego-inspired design framework called SiLago that provides ASIC-comparable energy efficiency and form factor but allows non-specialists like mechatronic and AI/ML experts from Atlas Copco to create a ready-to-manufacture custom chip.
The objective of this demo project is to validate the claim of SiLago by showing that it can be used by non-specialists to implement this challenging AI/ML system and meet its constraints.
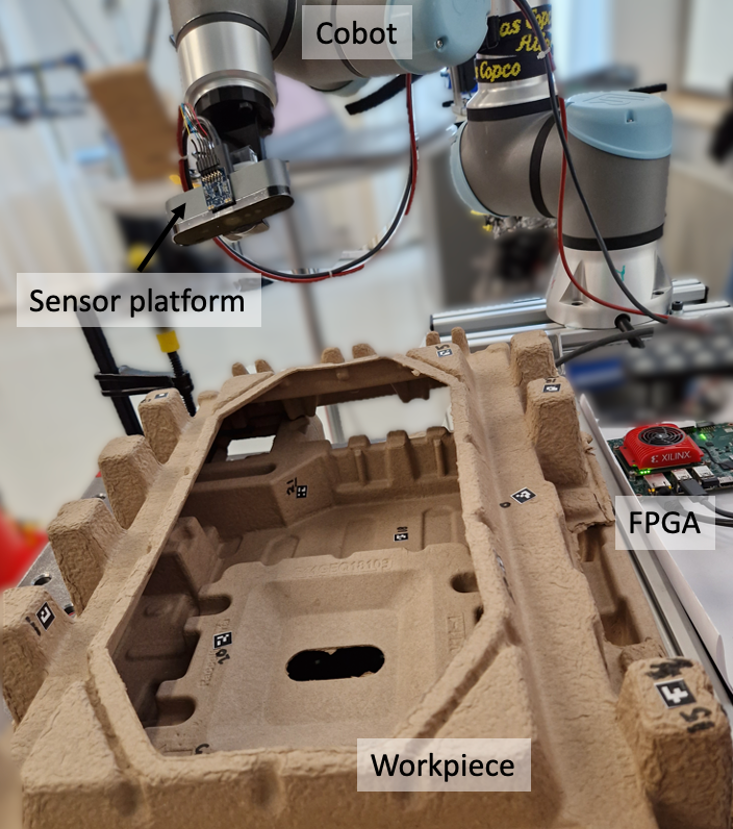
Background
Industry 4.0 or the Fourth Industrial Revolution refers to a significant transformation in how manufacturing and other industries operate, characterized by the integration of digital technologies, automation, data exchange, and smart systems. To align its product offerings with the Industry 4.0 vision, Atlas Copco has launched a pilot project to error-proof its tightening tools to improve the assembly process’s reliability, flexibility, and productivity. To achieve these objectives, it is developing an AI/ML-based sensor fusion system. Energy and cost-efficient implementation of such systems is a well-recognized challenge, and many large actors like Tesla, Google, etc. have opted for an ASIC-based design. However, the design cost of ASICs runs in 100s of MUSDs and requires large volumes and/or large profits to justify them. This often restricts ASICs as a solution to large actors.
To democratize access to ASIC-like efficiency for small actors and non-specialists, KTH has proposed a Lego-inspired design framework called SiLago. The impact of this demo project will be well beyond this specific use case from Atlas Copco; it will open the doors for ecologically and economically scalable energy-efficient digitalization in many sectors, including scientific super-computing.
Crossdisciplinary collaboration
This demo project spans multiple disciplines: mechatronics, AI and ML algorithms, sensor informatics, computer architecture, and VLSI design. It is a collaboration between KTH and Atlas Copco.
About the project
Objective
The project aims to develop an integrated digital infrastructure system to enhance the level of automation for smart construction. The initial goal will involve the creation of models for the digital twin of the robotic environment on construction sites. The digital twin will be used for remote real-time monitoring, prediction, optimization and multi-robot task planning and control. The results will be tested and applied to a practical Skanska use case.
Background
Construction sites today still rely to a large amount on manual labour, and the vision for the future is to leverage automation equipment (machines, robots) to the largest extent possible in order to speed up the production cycle, enhance quality while also reducing human risks, carbon emissions and costs. Smart construction, in essence, a flexible automation process, requires a stringent digitalization of the construction site in terms of real-time digital twins of products and production systems paired with advanced algorithms for the control of machines, the coordination of robots and the assurance of safety at the workspace.
The project strives to realise such systems, leading to fundamental research challenges and practical implementations in relevant use cases. The project developments can lay the foundation for future activities by forming and evolving a consortium nucleus.
Crossdisciplinary collaboration
The project partners are Ericsson AB, Skanska and KTH.
About the project
Objective
To develop an AI-driven information retrieval system for connecting engineers with existing enterprise design knowledge in a transparent and semantic manner.
Background
Engineers with design experience predating computational tools are retiring. At the same time, widespread and informal use of generative language modeling cheapens documentation, threatening to bury records of human creativity. We work with our industry partner NEKTAB (Nordic Electric Power Technology AB) to use AI-based language models for the structuring and semantic retrieval of multimodal artifacts of engineering design. Rather than generatively guess at answers, our method emphasizes transparency in connecting questions to actual instances of prior documented information, an important feature for preserving engineering knowledge.
Crossdisciplinary collaboration
This involves collaboration between computer scientists and mechanical engineers, and involves fields of natural language processing, data engineering, solid mechanics, and engineering design.
About the project
Objective
The project’s primary goal is to devise strategies for mitigating losses in properties covered by the City of Stockholm’s proprietary insurance firm, St Erik. To lay the foundation for a loss reduction strategy concerning fire and water losses, the project involves the combination and analysis of insurance data and administrative building-related data. This information will be supplemented with details regarding loss reduction measures taken at the individual building level. The results of the analysis will be used to put in place actual loss reduction measures.
Background
The City of Stockholm insures its buildings via St Erik. Among the insured buildings are the three major housing companies, along with the city’s real estate office. The housing companies Stockholmshem AB, Svenska Bostäder AB, and Familjebostäder AB own about 70,000 apartments. Currently, the City of Stockholm’s insurance company is experiencing an upward trend in insured losses. This trend is expected to continue in the future, even due to the impact of climate change. Improving loss prevention measures is crucial to enhancing resilience.
In collaboration with the City of Stockholm and its municipal companies, the project strives to both identify and implement effective loss prevention. The work will contribute to better adapting the City of Stockholm to the consequences of climate change.
Crossdisciplinary collaboration
The project partner is the City of Stockholms insurance company, St Erik AB.
About the project
Objective
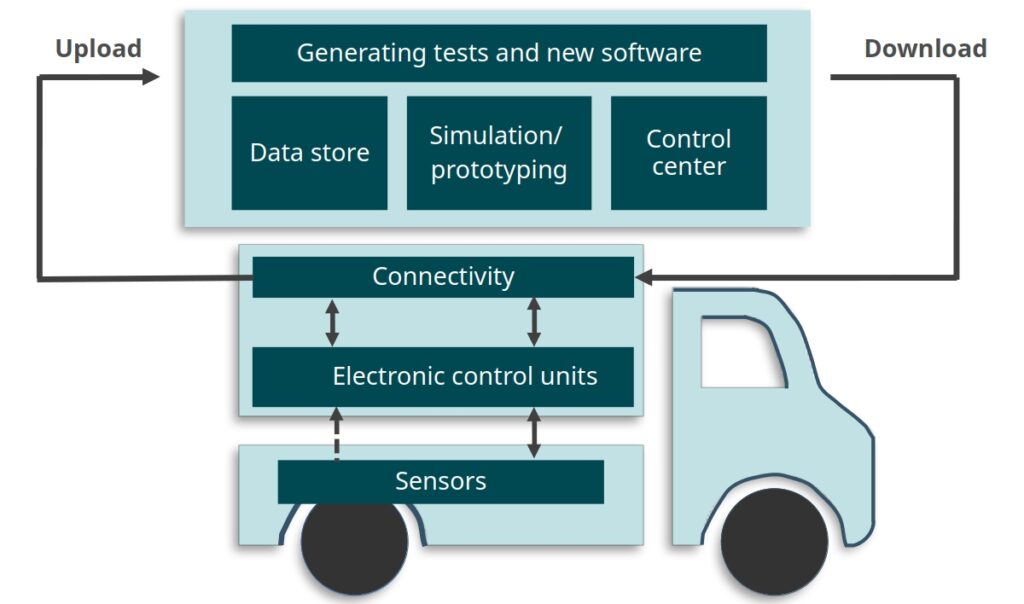
The overall objective of the project is to shorten the time needed for securely and safely deploying software updates to vehicles in the automotive industry. The project will address this in the context of software development for heavy vehicles at Scania and the toolchain for automated formal verification of code in the C programming language developed in the previous AVerT research project, called Autodeduct, which is based on the Frama-C code analysis framework and its ACSL contract specification language for C code.
As specific goals, the project will (i) extend Autodeduct with techniques for incremental formal verification as software evolves, (ii) extend the toolchain with support for non-functional requirements in software contracts focusing on safety and security properties relevant to Scania vehicles and including control flow and data flow, (iii) evaluate the techniques as implemented in the new toolchain on relevant code from Scania’s codebase to determine their efficacy, and (iv) develop a case study applying the new toolchain to a realistic software development scenario that demonstrates its applicability in an industrial setting.
Background
In the automotive industry, digitization means that vehicles increasingly depend on and are comprised of software components, leading towards software defined vehicles where most functions are primarily controlled by software. However, vehicle software components need to be continually revised by manufacturers to fix bugs and add functionality, and then deployed to vehicles in operation. Development and deployment of such software updates is currently demanding and time consuming—it may take months or even years for a new software component revision to reach vehicles.
Delayed time to deployment for software updates is in large part due to the long-running processes employed for assuring the revised software system meets its requirements, including legal requirements and requirements on safety and security. Currently, these processes often involve costly analysis of a system in a simulated or real environment, e.g., by executing an extensive suite of regression tests. The time required for running such tests can potentially grow with the size of the whole software system, e.g., as measured by lines of code in the codebase. Regression tests may also fail to consider non-functional properties such as security. The project aims to enable more rapid and trustworthy incremental development of software in heavy vehicles with guarantees of safety and security. Trust is built in the vehicle software development process by adopting tools with rigorous mathematical guarantees.
Crossdisciplinary collaboration
The project partner is Scania CV AB.