
About the project
Objective
The purpose of the project is to enable an end-user to make practical and useful conclusions about water content in a high-voltage transformers from indirect measurements provided by sensor data, including an understanding of the water content in the paper insulation and moisture in oil. To do so an advanced digital twin model will be developed that includes the simulation of non-uniform water distribution and allows for interpreting measurements from sensors. This will enable accurate life-cycle assessment.

Background
Electric insulation is an important part of stable and safe operation of high-voltage components and plays a key role in power delivery and meeting future rising electricity demand. One important component of this is the moisture dynamics in the transformer insulation. Moisture affects aging, reliability, and can lead to dielectric breakdown and subsequent component failure. Hence, it plays a crucial role in power generation and distribution. Insight into how water residual is distributed inside the transformer insulation is crucial for evaluating its safety, aging and overall reliability.
This project uses mathematical insight to build a digital twin that reliably and continually updates the moisture model based on real-time data. This will allow insight into information about various processes related to the moisture dynamics that are challenging to obtain otherwise and lays the foundation for real-time monitoring systems and accurate life-cycle assessment of key assets, which contributes to building a smart society.
Crossdisciplinary collaboration
The project is a collaboration between KTH, Hitachi and Imperial College.
Principal Investigators (PIs)
- Jennifer K. Ryan, KTH
- Tor Laneryd, Hitachi Energy
- Kateryna Morozovska, Imperial College London
About the project
Objective
Modern autonomous systems are required to operate in close collaboration with human operators in complex, dynamic environments, such as industrial settings, maritime operations, and disaster-response scenarios. In these contexts, autonomy must remain safe, adaptive, and responsive to human inputs, environmental disturbances, and evolving task specifications in real time.
The project aims to develop a unified control framework that enables autonomous systems to safely and adaptively collaborate with humans in complex and unstructured environments. Specifically, it will bridge high-level task allocation and trajectory planning with low-level feedback control using the mathematical paradigm of hybrid systems, and it will enable interactive decision-making and human supervisory inputs through the integration of game theoretic principles.
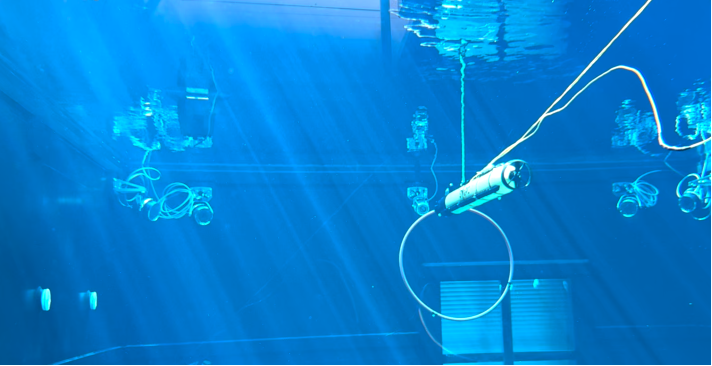
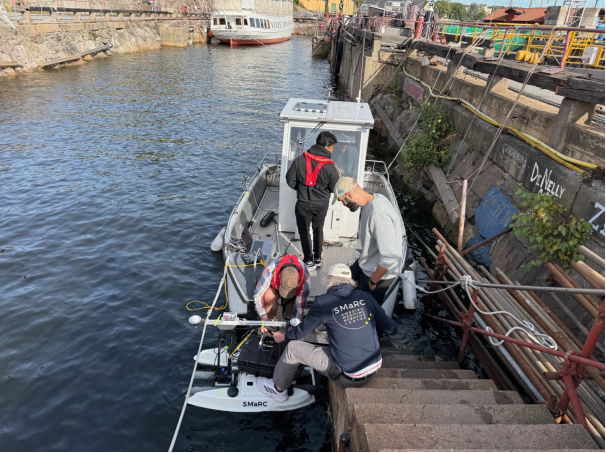
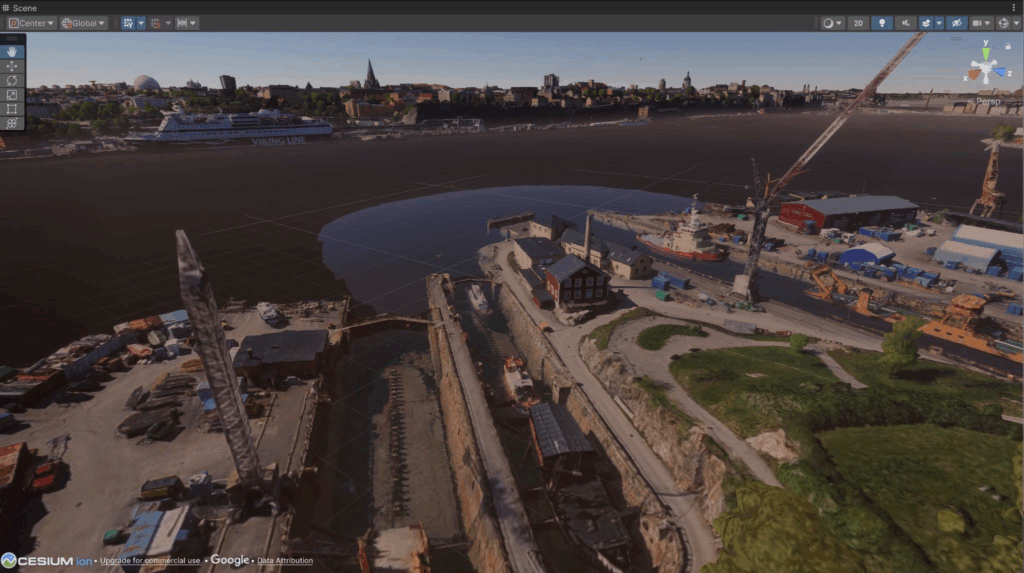
The project will further translate this theoretical framework into computationally tractable controllers suitable for real-time implementation on mobile autonomous systems. The proposed approach will be validated through real-world experiments in maritime robotics scenarios, including diver–robot collaboration missions in both controlled test tanks and open-water environments. By integrating new theory and experimental deployment, the project seeks to enable trustworthy, resilient, and adaptive human-in-the-loop autonomy across multiple time scales, from high-level decision-making to low-level feedback control.

Background
In recent years, autonomous systems have been increasingly deployed to work alongside human operators in executing complex, coordinated tasks. Prominent examples include warehouse automation, assembly-line operations, and intelligent logistics, where systems must handle tasks such as sorting, inspection, or replenishment under strict spatial constraints (e.g., limited workspaces and predefined pathways) and temporal requirements (e.g., synchronization and time-critical deliveries).
These challenges become even more pronounced in extreme environments, including underwater robotics, space exploration, and disaster-response scenarios, where systems operate in unstructured and uncertain conditions characterized by limited communication, poor visibility, and strong environmental disturbances. Across both industrial and extreme domains, the ability to adapt task allocation, planning, and control in real time is essential to ensure efficiency, resilience, and safety in human–robot collaboration.


Autonomous systems are increasingly employed alongside humans to perform complex tasks in both structured and unstructured environments.
The state-of-the-art control architecture for autonomous systems typically follows a layered structure consisting of task allocation, trajectory planning, and real-time low-level feedback control. Task allocation determines how tasks are distributed among agents, planning generates trajectories that satisfy spatial and temporal specifications, and low-level control ensures accurate tracking and safety. While effective in structured settings, this hierarchical stack is not inherently designed to account for real-time human intervention, changing objectives, or unexpected obstacles, which are central features of human-in-the-loop scenarios.
Cross-disciplinary collaboration
The project brings together complementary expertise in applied mathematics (hybrid systems, formal methods, and game theory), control engineering (model predictive control), and maritime and underwater robotics to address the challenges of human-in-the-loop autonomous systems in extreme environments. This cross-disciplinary collaboration tightly integrates mathematical modelling, control design, and real-world robotic experimentation.
PIs: Giuseppe Belgioioso, Dimos Dimarogonas, and Ivan Stenius.
About the project
Objective
Code generation with AI is making very fast progress. Nonetheless, it suffers from a fundamental drawback: it is unreliable, and users developers cannot trust the generated code, which is a major blocker. Our project TRUST-SW aims to solve this problem: AI will generate code alongside verification materials using state-of-the-art formal verification. By doing so, project TRUST-SW will enable users to produce dependable, correct code with generative AI. The specific objectives are:
- Generate specification from human language using LLMs: Develop capabilities for LLMs to translate human language into specification with no or minimal human supervision.
- Empower LLMs with deductive, explainable reasoning: Equip LLMs with deductive reasoning skills to debug and validate code based on natural language instructions and novel techniques.
- Embed and evaluate real-world constraints into code generation: Ensure that generated code aligns with practical requirements, handling complex constraints of real-world applications.
Background
Recent advances in generative AI, particularly large language models, have made it possible to automatically generate software from natural language prompts. While these tools significantly accelerate software development, the generated code may contain subtle bugs, security vulnerabilities, or logical errors that are difficult to detect. At the same time, formal verification techniques can mathematically guarantee software correctness but often require significant expertise and manual effort. TRUST-SW addresses this gap by exploring how AI systems can work together with formal reasoning and verification tools to automatically generate software that is not only functional but also provably correct and trustworthy.
Cross-disciplinary collaboration
TRUST-SW brings together expertise from several research areas, including artificial intelligence, formal verification, programming languages, and software engineering. The project combines advances in large language models with rigorous methods from formal methods and automated reasoning. This interdisciplinary collaboration enables the development of novel approaches where AI-generated code can be systematically verified and validated, bridging the gap between machine learning–based code generation and mathematically grounded software assurance.
PIs: Marco Chiesa, Martin Monperrus, Mariano Scazzariello.
About the project
Objective
Study the issue of outliers’ privacy from an information-theoretic point of view, propose an adapted privacy notion, such as pointwise maximal leakage, to solve it and design sanitising mechanisms in the light of these principled insights.
Background
The most popular privacy measure, differential privacy, can only protect outliers at the cost of destroying accuracy. Its relaxation, metric differential privacy, fails to guarantee the privacy of such isolated points.
About the Digital Futures Postdoc Fellow
Arnaud Grivet Sébert completed his PhD in CEA List, Gif-sur-Yvette, France, under the direction of Renaud Sirdey and the co-supervision of Cédric Gouy-Pailler. He proposed approaches that combine differential privacy and homomorphic encryption to protect the training data privacy in distributed machine learning.
He then worked on the privacy of textual data, and especially outliers, as a post-doctoral researcher in LIX (Laboratoire d’Informatique de l’Ecole Polytechnique), Palaiseau, France, with Catuscia Palamidessi and Sonia Vanier, and in Macquarie University, Sydney, Australia, with Annabelle McIver and Mark Dras.
He is now starting a post-doctoral contract in KTH, funded by Digital Futures and supervised by Tobias Oechtering and Martina Scolamiero. He is especially interested in the theoretical aspects of privacy, but also in its relations with other ethical properties like frugality, robustness, fairness.
Main supervisor
Tobias Oechtering, KTH
Co-supervisor
Martina Scolamiero, KTH
About the project
Objective
The project primarily addresses trustworthy AI deployment for mission-critical robotic systems operating in industrial and adversarial environments.
EdgeWise aims to redefine how Vision-Language-Action (VLA) models are deployed, executed, and secured for next-generation humanoid robots operating in connectivity-constrained and adversarial environments.
The main objectives are to:
- Design a novel three-tier VLA deployment architecture (on-device, edge, cloud) to reduce end-to-end control loop latency and increase resilience in unstable network conditions.
- Enable efficient multi-tenant edge model serving by compressing fine-tuned models into lightweight adapters that share a common base model, significantly improving resource utilization.
- Introduce verifiable and interpretable execution planning, where robots generate structured code from natural language instructions and apply formal verification methods to ensure correctness and safety before execution.

Background
Humanoid robots powered by Vision-Language-Action models have the potential to transform healthcare, construction, search-and-rescue, and other labor-intensive or hazardous domains. However, current VLA architectures rely heavily on cloud-based reasoning models, which introduce latency and depend on stable connectivity. This makes them unsuitable for many real-world scenarios such as disaster zones, underground mining, or remote medical environments.
Moreover, VLA systems often generate opaque action tokens that are difficult to interpret or verify, raising serious safety and security concerns. Recent studies show that language-model-controlled robots can be manipulated into performing unsafe actions, highlighting the urgent need for transparency and formal guarantees.
EdgeWise addresses these limitations by combining edge computing, efficient model sharing mechanisms, and formal verification techniques to enable secure, resilient, and low-latency robotic AI systems.
Crossdisciplinary collaboration
EdgeWise is a collaboration between RISE and KTH, combining expertise in:
- Distributed systems and edge/cloud orchestration
- Machine learning systems and large-model deployment
- Formal verification and secure software systems
- Robotics and real-world experimental testbeds
The project integrates systems research, AI model optimization, networking (5G/6G), and formal methods. The experimental platform includes robotic systems connected to a private 5G infrastructure and research data center resources, enabling controlled evaluation of latency, resilience, and safety mechanisms.
PI: Joakim Eriksson, RISE
Co-PI: Marco Chiesa, KTH
About the project
Objective
The project will develop a novel class of data-driven reduced-order models (ROM) that can represent wind farm flow dynamics with high-level accuracy, while being fast enough to support operational run-time analyses. The central aim is to bridge the gap between detailed computational fluid dynamics (CFD) simulations and the simpler models typically used in operational contexts, by employing CFD data to develop and train new machine-learning based models. The research will follow a modular and progressive strategy, starting from single turbine wake representation and then extending to farm-level interactions modeling.
Background
Wind farms operate in atmospheric conditions that vary across a wide range of spatial and temporal scales. At the farm scale, wakes develop and interact in ways that are difficult to capture with standard superimposition-based engineering models, especially if the site includes strong dependencies on terrain complexities, stability-driven variability, or farm-scale phenomena such as global blockage, which can contribute to systematic misprediction in terms of power forecasting and operating strategies.
High-fidelity CFD, for example large-eddy simulation, can capture these interactions at wind-farm scale, but the computational cost makes it impractical for real-time monitoring and frequent predictive analyses. By contrast, existing ROMs are often built on semi-empirical or engineering approximations that represent wakes through superposition of velocity deficits, deflections, and added turbulence. Although computationally efficient, these models often fail to capture complex wake-wake interactions, terrain-induced flow effects, stability dependent variability, and farm-scale phenomena such as blockage. Moreover, they are rarely designed to ingest real operational data, such as supervisory control and data acquisition (SCADA) logs, which encode the actual operating states of a wind farm. This motivates the need to bridge the gap between accurate but expensive simulations and fast but less reliable wake models, enabling near-real-time representations that can support forecasting, optimization, and future control strategies.
About the Digital Futures Postdoc Fellow
Filippo De Girolamo is a mechanical engineer and researcher working at the intersection of computational fluid dynamics and machine learning for wind energy applications. He holds a PhD in Energy and Environment from Sapienza University of Rome in Italy, with research focused on wind turbine flows and data-driven modeling of wake dynamics in offshore environments. He has developed experience across multiple wind energy problems, including wake and turbulence modeling with Large-Eddy Simulation, data-driven wake decomposition via unsupervised learning, and SCADA-based diagnostics for wind farm monitoring. He also carried out a research visit at the University of Texas at Dallas, working on high-fidelity simulations of real wind farms in complex terrain.
Main supervisor
Prof. Dan Henningson, KTH
Co-supervisor
Prof. Hedvig Kjellström, KTH
About the project
Objective
This project aims to develop a reliable and robust AI tool for early fault detection in power transformers. By combining physical laws with limited operational data, the project aims to predict the health and remaining lifetime of power transformers efficiently. The developed AI tool would enable proactive maintenance, reducing costs and enhancing power grid reliability.
Background
Power transformers play a silent but crucial role in our daily lives. They enable the transmission of electricity over long distances, powering homes, hospitals, industries, and public infrastructure. Although they usually operate unnoticed, transformers are subject to high stress and age over time. When a transformer fails, the consequences can be severe, including power outages, costly repairs, and safety risks. Today, many transformer failures happen because problems are detected too late, mainly due to limited and incomplete monitoring data.
To reduce these risks, various indicators are used, such as gas measurements, thermal images, vibration signals, and magnetic behavior, to assess a transformer’s condition. However, collecting large amounts of high-quality data from all these sources is difficult and expensive. Most existing AI methods depend heavily on large datasets, which limits their usefulness in real-world power systems. The project tackles this challenge by developing an AI model that combines data with physical knowledge about how transformers work. By embedding physics directly into the learning process, the model can learn meaningful patterns even from limited data.
The proposed approach uses a physics-enhanced multimodal neural operator framework that can combine information from multiple data sources and predict how long a transformer can continue to operate safely. The model is designed to be fast, reliable, and suitable for real-time monitoring. By enabling early fault detection and maintenance decisions, this research supports the digital transformation of power infrastructure and contributes to a more stable, efficient, and sustainable energy grid.
About the Digital Futures Postdoc Fellow
Abhishek Chandra is a Postdoctoral Research Fellow at the School of Electrical Engineering and Computer Science at KTH Royal Institute of Technology. He holds a PhD in Electrical Engineering from Eindhoven University of Technology, The Netherlands, where his research focused on developing AI tools for characterizing piezoelectric and magnetic materials. His academic background includes applied mathematics, scientific computing, and AI. Abhishek has received several prestigious fellowships and scholarships, including the Digital Futures Postdoctoral Fellowship at KTH and the Information and Knowledge Society Scholarship at Université de Lille. With expertise in scientific machine learning and energy systems, his work aims to bridge the gap between theoretical AI models and practical engineering applications in critical infrastructure.
Main supervisor
Prof. Dr. Lina Bertling Tjernberg, Full Professor, Department of Electric Power and Energy Systems, EECS, KTH.
Co-supervisor
Prof. Dr. Cristian Rojas, Full Professor, Department of Decision and Control Systems, EECS, KTH.