
About the project
Objective
This project aims to develop hardware and software for an open-source DNA test to enable point-of-care self-testing. This system will consist of a disposable and low-cost test strip, a low cost, and a small electronic device that carries out the tests. It will read the results digitally and communicate them directly to smartphones. The project will be carried out in a collaboration between a research lab at CBH School, the KTH prototype centre and hospitals for patient samples and testing. In the short term, this project can immediately be used for digital DNA detection of the novel SARSCoV-2 virus. More importantly, open-source, fully digital DNA tests can have a long-term effect on global health care by digitalizing and democratizing molecular diagnostics.
Background
The classical Nucleic-acid amplification testing (NAAT) requires several steps, and the current tests are mainly performed by highly trained personnel using advanced machinery in centralized laboratories. In the past decade, the Hamedi Lab and numerous others pioneered the development of analytical devices fabricated by using high throughput printing techniques on paper and other substrates to build diagnostic devices which are very cheap and simple to manufacture. All steps of liquid handling, storage of reagents, biochemistry, and electroanalytical detection, can be performed inside this paper. A few examples have shown that NAAT tests can be performed using these printed diagnostics devices.
Crossdisciplinary collaboration
The researchers in the team represent the School of Engineering Sciences in Chemistry, Biotechnology & Health, KTH and the School of industrial engineering and management, RISE.
About the project
Objective
In this project, we propose to extend current assessments of the various synergies and trade-offs among the Sustainable Development Goals (SDGs) proposed by the United Nations (UN) via methods based on artificial intelligence (AI). The project will also strengthen the collaboration between Digital Futures and the KTH Climate Action Centre.
The proposed research project is relevant due to the pressing need to develop a policy that enables, rather than inhibits, sustainable development. Furthermore, including AI-based methods in governance actions and development programs is essential.
Background
This is currently an active area of research, where several studies have started to document the interactions among SDGs systematically. As this type of work is extremely relevant for policymakers, as well as to guide promising research directions to explore by funding agencies, we will:
- Compare AI-based analyses with expert-based studies.
- Systematically assess (via AI methods) synergy and trade-offs connected to climate policy decisions in the context of the SDGs.
- In the final stage, employ reinforcement-learning-based methods to design novel and efficient strategies for policy development, maximizing the opportunities among SDG actions and avoiding the pitfalls.
Crossdisciplinary collaboration
The researchers in the team represent the KTH Schools of Engineering Sciences, the Department of Engineering Mechanics, the School of Industrial Engineering and Management, and the Climate Action Centre.
About the project
Objective
This demo project will develop a prototype for mid-sized haptic seated interactions in collaboration with Volvo Cars. The demo will exemplify how to prepare drivers to dis -and re-engage with self-driving cars through the seat, create posture awareness and increase comfort for drivers. This is an urgent need for our collaborators at Volvo Cars, which impacts the safety and feasibility of semi- and automated cars on the roads. The prototype will be designed using novel haptic technologies and interaction design techniques that develop and strengthen a mutual collaboration between the user and the system. The project will result in technical innovation in mid-level haptics and the construction of design knowledge for an orchestrated meaningful touch of the body.
Background
Semi-autonomous cars are a growth area. Designing interactions within self-driving cars that are able to re-engage drivers in a driving issue in a timely and safe manner continues to be an open question for manufacturers and researchers. This project will demonstrate the feasibility and efficacy of using mid-sized haptics embedded within a car seat to re-engage and disengage a driver in a semi-autonomous car setting.
Crossdisciplinary collaboration
The researchers in the team represent the School of Electrical Engineering and Computer Science, the School of Industrial Engineering and Management at KTH and RISE.
About the project
Objective
This project aims to support planning for universal access to clean cooking and contribute to Sustainable Development Goal 7 (SDG7) on Affordable and Clean Energy by radically integrating artificial intelligence (AI) methods into the open-source geospatial clean cooking model OnStove. To enhance OnStove, the project proposes implementing geospatial AI learning models to improve the spatial understanding of current technologies used for cooking and generate quasi-optimal transitions over an extended modelling period, considering as well behavioural issues. To achieve this, open-access geospatial information is combined with ground information gathered through available survey data. Finally, all comes together as a new open-source, user-friendly interface that will enable a broader audience to use the tool and ensure a long-term community of practice around clean cooking access modelling.
Background
Approximately 2.3 billion people still lack access to clean cooking worldwide, making them rely on traditional and polluting fuels. This practice poses challenges as households spend significant time collecting and cooking with traditional fuels, impacting women and children. Cooking with polluting fuels causes severe health consequences, estimated at around 3.2 million premature deaths annually from respiratory diseases. Moreover, traditional cooking exacerbates climate change and causes deforestation around the globe. On previous efforts, the first open-source geospatial tool for assessing and comparing the net benefits of various cooking solutions, OnStove, was developed. The tool was applied in the first study for sub-Saharan African countries, using Geospatial Information Systems (GIS) to evaluate cleaner cooking solutions in each square kilometre of the region. The tool considers benefits such as reduced morbidity, mortality, greenhouse gas (GHG) emissions, and time saved while factoring in investment costs, fuel purchase, and operation and maintenance.
By calculating the relative differences between current fuel stoves used and cleaner alternatives, OnStove determines a transition’s net benefit (benefits minus costs) and selects the options providing the highest net benefit in each square kilometre. Decision-makers can use the outputs to understand the impacts of achieving clean cooking access, including estimates on deaths avoided, time saved, GHG emissions avoided, health and GHG emissions costs avoided, total costs, and affordability constraints. OnStove facilitates decision-makers in identifying areas for action, guiding market strategies, and prioritizing investments to promote diverse clean-stove options in low- and middle-income countries. The tool has gained policy community interest, aiding energy access planning in Nepal and Kenya. It is also integrated into global initiatives like the World Resources Institute’s Energy Access Explorer and the International Energy Agency’s Clean Cooking Outlook Special Report.
Crossdisciplinary collaboration
Our project benefits from the expertise of a diverse team from the Department of Energy Technology and the Department of Sustainable Development, Environmental Science and Engineering at KTH Royal Institute of Technology. Furthermore, we collaborate closely with international organizations active in the clean cooking domain, such as the Clean Cooking Alliance (CCA), the World Resources Institute, The International Energy Agency, and Sustainable Energy for All. This expert group ensures that we have the technical and practical background to develop an innovative solution that addresses the project’s challenges and supports achieving SDG7’s clean cooking goals.
About the project
“Advancing real-time exoskeleton control for human-in-the-loop optimization” is a continuation of the completed project Real-time exoskeleton control for human-in-the-loop optimization.
Objective
Our proposal is to build a physical prototype of a modular lower-limb exoskeleton system with a digital interface to a real-time variable controller. The prototype will be equipped with motors that provide variable control to different joints and joint ranges of motion while being capable of supporting real-time control of its kinetic properties. By varying the assistive strategies in the exoskeleton system via a digital interface, we will enable human-in-the-loop (HILO) optimization in order to find optimal control strategies for different users and different goals.
Background
Persons with physical disabilities are the largest minority group in the world, and global trends in ageing populations indicate an expected increase in the population affected by disability. In Sweden, musculoskeletal disorders are one of the most common causes of long-term disability.
Wearable robotic assistive exoskeletons have undergone rapid developments in the past decades, yet only a handful of products are used frequently, either within or outside of research environments. A major reason for this is that a device must be adjusted for user compliance and efficacy for optimal effect and comfort. Using methods for automatically discovering, customizing, and continuously adapting assistance could overcome these challenges, allowing exoskeletons and prostheses to achieve their potential.
Crossdisciplinary collaboration
The researchers in the team represent the KTH School of Engineering Science, Department of Engineering Mechanics and KTH School of Industrial engineering and management, department of Machine Design.
About the project
Objective
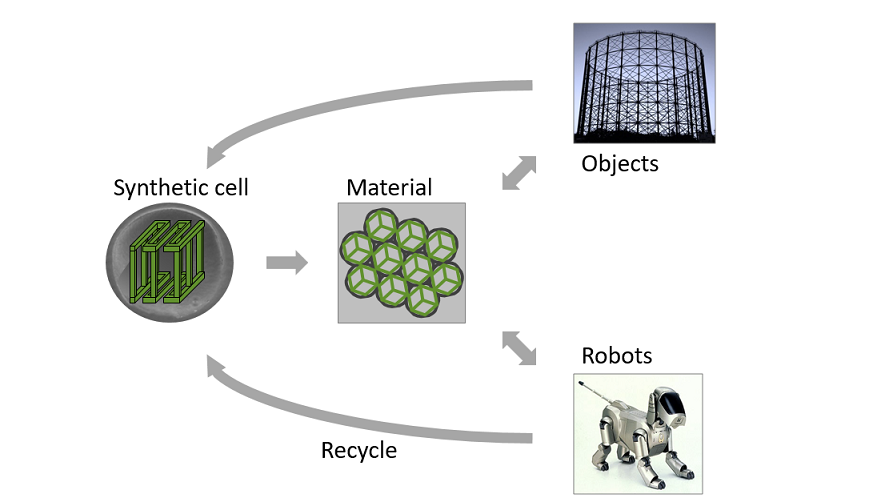
The aim of the research team is to realise and research the first objects of programmable, robotic matter. Robotic matter consists of thousands or millions micro-scale components and forms objects that can autonomously change their shape and material properties. The research results can be the foundation for future generations of robotic matters configured with various physical functionalities.
Background
Robotic matter does not exist today, but if we can create and use it, we could solve several major societal challenges. The ultimate scenario is the opportunity to create all kinds of objects. An everyday and relevant example is using robotic matter to create and re-create packaging instead of using non-circular plastic materials. Another example is a decreased demand for transportation of goods when we can create any object we want in the location where it is needed.
Cross-disciplinary collaboration
The research team represents the School of Electrical Engineering and Computer Science (EECS, KTH) and the School of Engineering Sciences in Chemistry, Biotechnology and Health (CBH, KTH).
Press & Media
Article in Elektroniktidningen: https://issuu.com/etndigi/docs/etn2102ld
or download a pdf here: Article in Elektroniktidningen Feb 2021
Activities & Results
Results
We aim to build robotic matter consisting of thousands or millions of microscale components, so-called “synthetic cells”, that form objects that can autonomously change their shape and material properties.
Realising this objective requires combining four sub-objectives:
- Synthesis of the synthetic cells
- Thermoreversible bonding of the synthetic cells
- Magnetic orientation of synthetic cells with anisotropic properties to program the overall material properties emerging from the resulting cell conglomerate
- Transporting synthetic cell material throughout the object to program the overall material shape
Project results
WP1 Synthesis and thermoreversible bonding results:
Investigating the thermoreversible bonding of microparticles.
WP2 Magnetic material programming results:
Investigating integration of small magnets in every cell, and the material property programming by magnetically rotating the anisotropic cells prior to fixation.
WP3 Shape programming results:
Introducing shape programming of solid objects based on the local fluidisation of the object, followed by transport of the fluidised substance through the object by an internal pumping mechanism.
Publications
We like to inspire and share interesting knowledge!
- Programmable Matter with Free and High-Resolution Transfiguration and Locomotion; Kerem Kaya, Alexander Kravberg, Claudia Scarpellini, Emre Iseri, Danica Kragic and Wouter van der Wijngaart. First published on 24 December 2023 in Advanced Functional Materials.
- Copper-mediated synthesis of temperature-responsive poly(N-acryloyl glycinamide) polymers: a step towards greener and simple polymerisation; Nikola Křivánková, Kerem Kaya, Wouter van der Wijngaart and Ulrica Edlund. First published on 4 October 2023 in RCS Advances.
- Soft metamaterial with programmable ferromagnetism; Kerem Kaya, Emre Iseri and Wouter van der Wijngaart. First published on 6 December 2022 in Microsystems and Nanoengineering.
About the project
Objective
This impact project focuses on one of the main areas of the Democritus collaborative project, the digitization of drinking water and wastewater networks. Based on the results of the Democritus project, the objectives of this impact project are the following:
- Demonstrate the viability of theoretical modelling to the water industry by applying the project results to address practical water network problems defined by SVOA and Stockholm City. The collaboration will increase digitalization-related know-how in the Swedish water sector.
- Demonstrate the theoretical results on pollutants and leak localization in small-scale water network testbeds within the international collaboration. This way, we connect the communities of experimental and theoretical research on water distribution networks.
The results will be disseminated through stakeholder workshops, open-source software and accessible video material.
Background
The Smart Society critically depends on large infrastructures like electrical grids or water distribution networks that need to operate efficiently, with predictable performance and meet strict safety and security requirements. In the Democritus collaborative project, we have investigated the problems of monitoring and managing these large critical infrastructures with the help of digitization. Within this large area, we focused on three main topics: (a) distributed learning over wireless networks, (b) learning accuracy and security in large systems, and (c) learning for detection and localization with application to water networks.
Cross-disciplinary collaboration
The team consists of experts from the School of Electrical Engineering and Computer Science and the School of Engineering Sciences at KTH, from Stockholm University and RISE, with research experience in network design and optimization, learning and decision making, security of cyber-physical systems, and large-scale experimentation. The project collaborates with SVOA, the Stockholm Water company.