
About the project
Objective
This project aims to provide mitigation solutions for decision-makers to reduce human and environmental exposure to particle emissions caused by the transport sector. Through the use of cross-disciplinary approaches, the project develops methodologies that are tested and validated by adopting Stockholm as a digital sandbox.
Background
In our daily city life, we are constantly exposed to means of transport such as passenger vehicles, heavy-duty vehicles, and rail transportation. These vehicles release toxic particle emissions originating from exhaust and non-exhaust sources. Recent projections indicate an increase of non-exhaust emissions in urban areas from 0.5% in 2021 to 67% in 2050. Non-exhaust emissions are the primary source of inhalable Particulate Matter (PM). With a diameter smaller than 10 µm, PM10 can be inhalable by humans causing inflammations and other health diseases. On the other hand, PM with a size larger than PM10 can deposit over the nearby infrastructures contributing to environmental pollution.
Stockholm is among the forefront European cities capable of monitoring in real-time level of PM and policy makers strive to mitigate these emissions. However, despite these efforts, the concerns regarding the increase of non-exhaust PM in the urban areas remain critical.
About the Digital Futures Postdoc Fellow
Henri Giudici completed his Ph.D. in Civil and Environmental Engineering at the Norwegian University of Science and Technology – NTNU (Norway). He specialized in vehicle tire-pavement interactions in winter conditions. His research supported the Norwegian road authority in reducing road salt application rates during winter. Between 2019 and 2022, he served as an industrial Principal Scientist, developing technologies and data-driven approaches for assessing the quality of transport infrastructures. In 2022, he continued his academic career as a researcher in systems engineering at the University of South-Eastern Norway – USN (Norway). In his current Digital Futures postdoc, Henri fosters agile approaches to integrate scientific evidence into policy-making by bridging transport tribology, systems engineering and data science.
Main supervisor
Ellen Bergseth, Associate Professor at Department of Engineering Design, KTH.
Co-supervisor
Ulf Olofsson, Professor at Department of Engineering Design, KTH.
About the project
Objective
To develop DeepAqua-II, a robust, scalable deep-learning system for global surface-water monitoring using SAR time-series data.
Specific objectives (O1–O5):
- O1: Design a technique to normalize SAR pixel intensity values so models remain resilient to sensor adjustments.
- O2: Build a self-supervised semantic segmentation model using SAR time-series without needing optical data.
- O3: Add support for L-band SAR sensors to detect water under vegetation.
- O4: Quantify changes in surface-water extent across multiple climate regions for 2015–2027.
- O5: Communicate and disseminate results to maximize impact, including training and capacity building.
Background
Surface water is declining worldwide, requiring more accurate monitoring.
- Traditional monitoring depends on optical satellite imagery, which fails under clouds and vegetation.
- Existing SAR-based models require manual annotations and retraining whenever sensors change.
- The earlier DeepAqua project achieved strong performance but still depends on optical data and lacks resilience to sensor adjustments.
- The upcoming NISAR mission introduces L-band SAR, enabling deeper vegetation penetration.
- There is a global need for automated, scalable, optical-independent methods for long-term water-extent mapping.
Crossdisciplinary collaboration
Hydrology & Environmental Sciences
- Led by Professor Zahra Kalantari
- Expertise in water resources management, hydrology, climate-change impacts, and sustainability.
Computer Science & Machine Learning
- Led by Associate Professor Amir H. Payberah
- Expertise in scalable machine learning, deep learning, and time-series modeling.
Nature of collaboration
- Integrates SAR remote sensing, deep learning, and climate/land-water systems.
- Builds on joint results from DeepWetlands and DeepAqua.
- Enables a cooperative system for global-scale water monitoring.
About the project
Objective
- Development of novel interaction techniques that enable users to collaboratively create and modify immersive environments in real time, leveraging generative AI for dynamic content generation based on user input.
- Creation of AI-enhanced XR scenarios that vary in visual fidelity, input modalities, and agent embodiment. These will be systematically evaluated to understand their effects on user engagement, interaction quality, and perceived agency of AI.
- In-depth studies on how users perceive, interact with, and respond to AI agents in XR, with attention to trust, collaboration, and perceived autonomy in task performance and social interaction.
- Evidence-based design guidelines for integrating agentic AI in immersive environments, with considerations for interaction design, ethical implications, and support for individual and collaborative experiences.
This project is primarily situated at the intersection of Rich and Healthy Life and Cooperate within the Digital Futures research matrix. It explores how AI-enhanced XR environments can foster meaningful human-AI collaboration across immersive scenarios. The project also contributes to the societal context by designing XR experiences that support personal development, creativity, and skill-building. Through dynamic, interactive, and adaptive environments, the system enables users to engage in: (1) self-paced learning and creative prototyping, (2) scenario rehearsal and training, and (3) immersive co-creation. Central to the Cooperate theme is the exploration of multi-agent and multi-user interaction, focusing on how AI agents can support, guide, or adapt in real time to facilitate shared decision-making and effective human-human collaboration, mediated or enhanced by AI.
Background
Artificial Intelligence (AI) and Extended Reality (XR), which includes Augmented Reality (AR), Virtual Reality (VR), and Mixed Reality (MR), represent two rapidly evolving domains that are reshaping the modalities through which humans engage with digital systems. AI technologies are now deeply embedded in a wide array of applications, ranging from algorithmic recommendation systems and automated content generation to complex decision-support tools used in domains such as traffic management and surgical procedures. Concurrently, XR technologies are becoming increasingly mainstream due to advances in hardware and the availability of affordable head-mounted displays, making immersive experiences more accessible to both industry and the general public. Although both AI and XR are subjects of extensive research, the intersection of these fields, particularly within the context of Human-Computer Interaction (HCI), remains relatively under-investigated. In particular, the integration of AI-driven agents, including conversational agents, within XR environments poses novel questions regarding interaction design, user experience, and the role of intelligent systems as co-actors in immersive settings.
Cross-disciplinary collaboration
The researchers in the team represent the KTH School of Electrical Engineering and Computer Science and RISE Research Institutes of Sweden, Digital Systems Division.
About the project
Objective
This project aims to explore the emerging gigantic multiple-input multiple-output (gMIMO) technology in the physical layer, using methodology from signal processing and information/communication theory. gMIMO relies on using 10 times more antennas in base stations and user devices than in current networks, by operating in the upper mid-band where antennas are smaller. This enables massive spatial multiplexing and beamforming. The research results are anticipated to be applied to 6G and future wireless communication networks and provide valuable insights into their integration within a wide range of digital transformation.
Background
Sixth-generation (6G) wireless communication is crucial for enabling society’s digital transformation and future cyber-physical world. Many transformative applications, such as ultra-massive connectivity, immersive extended reality (XR) communication, smart factories, and intelligent transportation systems, can be efficiently facilitated by intelligent 6G wireless networks. To support these extensive usage scenarios, delivering exceptionally high data rates to many users is important. Since fourth-generation (4G) wireless networks, multiple-input multiple-output (MIMO) technology has been a key technology to deliver higher rates.
With the advancement of wireless networks, MIMO technology has also significantly evolved with the continually increasing number of antennas. To further empower the 6G and future wireless networks, gigantic MIMO (gMIMO) is highly anticipated by utilizing hundreds or a thousand antennas, which is the major focus of this project.
About the Digital Futures Postdoc Fellow
Zhe Wang received his PhD degree in 2025 from the School of Electronic and Information Engineering at Beijing Jiaotong University, China. His research focuses on promising 6G wireless communication technologies, including gigantic MIMO, cell-free massive MIMO, and near-field communication.
Main supervisor
Emil Björnson, KTH
Co-supervisor
Vitaly Petrov, KTH
About the project
Objective
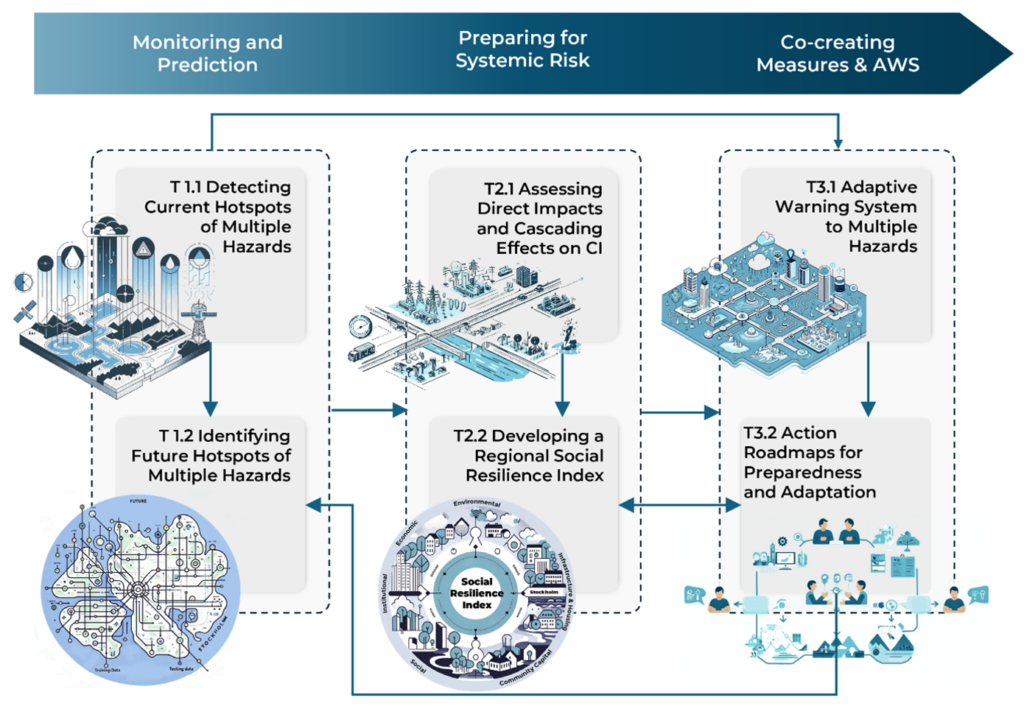
The project aims to enhance the resilience and preparedness of Stockholm against multiple hydrometeorological hazards, primarily flooding, droughts, and heatwaves, by developing innovative monitoring systems, assessing systemic risks, and co-creating adaptive warning systems and action roadmaps with stakeholders.
Background
Urban areas are increasingly vulnerable to hydrometeorological hazards, which are growing in frequency and severity due to climate change and urbanization. These events pose significant risks to Critical Societal Services and Infrastructure (CSSIs), including transport, water, and energy systems. Traditional risk analyses often focus on single hazards and overlook cascading impacts across interconnected systems. CASCADE addresses this gap by integrating advanced AI-based prediction models, network analysis, and stakeholder-driven approaches to build a comprehensive framework for disaster preparedness and climate adaptation.
Cross-disciplinary collaboration
CASCADE brings together expertise from KTH Royal Institute of Technology, the City of Stockholm, and RISE. The collaboration integrates environmental and water engineering, computer science, systems analysis, and urban planning with practical municipal and industry perspectives. This transdisciplinary partnership ensures that solutions are scientifically rigorous, technologically advanced, and practically applicable.
About the project
Objective
This project aims to align the legal requirements for emerging digital technologies, such as AI systems, with the development of such technologies. The regulatory demands for responsible AI, such as the need for transparency, protecting privacy and taking into account fundamental rights, are mandated by the recently enacted AI Act. This project will identify and address the challenges associated with transposing the legal demands of the AI Act into technical specifications in order that the developed technology is ethical and also legally compliant from the outset.
This industrial postdoc project is a collaborative initiative between KTH, Stockholm University, and industry partner Scania. By integrating legal and technical expertise, it will contribute to Scania’s broader efforts within AI regulatory compliance and support the implementation of responsible AI practices across its internal initiatives.
Background
The ICT sector has an environmental footprint. The future development of this footprint is debated, and it Artificial intelligence (AI) has many positive uses but the widespread adoption of this technology has also raised some concerns over the risks associated with its usage, such as biased decision-making, a lack of privacy preservation, environmental concerns and the diminishing of fundamental rights in general.
The European Union AI Act entered into force on the 1st of August 2024 and is the first comprehensive legal framework regulating AI systems. Its primary objective is to promote trustworthy AI systems, thereby ensuring that AI technologies are safe, transparent and aligned with EU values, while also fostering innovation.
This project will focus primarily on AI governance with the objective of promoting responsible AI as mandated by the AI Act. It will focus on how legal demands for transparency, trustworthiness, privacy, technical robustness, and avoidance of unfair bias should be interpreted for incorporation into corporate processes so as to proactively promote legal compliance. Part of this task will involve the identification and implementation of additional soft law elements, for example, harmonized standards developed by EU standardization bodies as well as guidelines produced by various EU institutions.
Partner Postdoc
Anna De Carvalho Guimarães
Main supervisor
Tobias Oechtering, KTH
Co-supervisor(s)
Stanley Greenstein, Stockholm University
Rami Mochaourab, Scania
About the project
Objective
The main objective is to develop a Content-Based Image Retrieval (CBIR) system using a large database of longitudinal brain Magnetic Resonance Imaging (MRI) of patients with dementia. By using artificial intelligence, the system will detect patterns and similarities in the longitudinal images, empowering healthcare professionals to predict treatment outcomes and deliver personalized care. Eventually, this tool aims to simplify decision making, improve patient care and make healthcare more efficient and cost-effective.
Background
As the global population ages, dementia diseases are becoming increasingly prevalent, currently affecting approximately 47 million individuals and imposing an economic burden of around $2.8 trillion. Innovative computer-aided diagnosis techniques, particularly CBIR, have been transformed by enhancing the retrieval of relevant images for patients with or at risk of dementia. Scientific evidence suggests that spatio-temporal patterns from longitudinal recordings can significantly improve outcomes in cross-sectional studies. However, progress in this field has been hindered by limited access to longitudinal databases, small dataset sizes, and ineffective analytical methods.
About the Digital Futures Postdoc Fellow
Félix received his PhD in Electronic Engineering from the Universitat Politècnica de València. His research has centered on applying artificial intelligence and signal processing techniques to biomedical data analysis. His thesis focused on developing a state-of-the-art preterm labor prediction system using Electrohysterography (EHG), successfully addressing challenges such as low incidence rates and limited data availability.
His work spanned the entire research process, from clinical data acquisition and signal preprocessing to the design of an automated decision-making system. Building on this foundation, he has expanded his proficiency in medical imaging modalities, and gained experience with modern deep learning architectures.
Main supervisor
Rodrigo Moreno, Associate Professor, School of Engineering Sciences in Chemistry, Biotechnology and Health (CBH), KTH Royal Institute of Technology
Co-supervisor
Chunliang Wang, researcher with Docent title at School of Technology and Health (STH), KTH Royal Institute of Technology